
Page 6 - 《应用声学》2022年第4期
P. 6
504 2022 年 7 月
置互换时声场将不会改变。若探测设备放置在临
0 引言 界深度以深的 RAP中,可以对图2 中直达声与海面
反射声共存区内的近海面目标实现 “无盲区” 监测。
随着各国对海洋开发力度的加大和深海环境
此外,探测区域三维空间为以探测设备深度方向轴
水声技术研究需求的急剧增加,对于中远程距离
对称的 “碗”,其碗口口径为海深的 5 ∼ 7 倍。因此,
内的深海水下运动目标的探测已成为当前水声技
RAP 的上述特性有望提高声呐系统对中近距离水
术研究的热点。深海可靠声路径 (Reliable acoustic
下目标探测和定位的性能。
path, RAP) 作为近海底深水区和海面附近水域之
间的一种直达波传播路径,具有声传播距离远、传 0
播损失小、传输信道稳定、低频环境噪声级低等特
1000
点,便于利用深海海底附近的水听器,实现对近海面
中近距离目标有效而无盲区的监测,近年来备受国 2000
内外学者关注和研究。国外对于深海的研究起步早 ງए/m
3000
且已经进行了大量的研究和实验工作,相对而言,我
国在相关方面的研究起步晚,实验工作较少,对深海 4000
环境特征、水声传播特性等仍缺少长期的声学观测
5000
和数据积累 [1] 。因此,深海声场特性的研究和深海 1480 1490 1500 1510 1520 1530 1540
ܦᤴ/ mSs -1
目标探测定位技术的发展日益重要,需要迎头赶上。
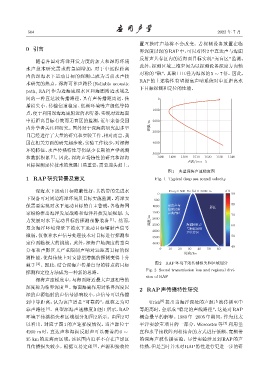
图 1 典型深海声速梯度图
1 RAP研究背景及意义 Fig. 1 Typical deep sea sound velocity
深海水下运动目标隐蔽性好,其携带的先进水 Freq=500 Hz Sd=4200 m dB
0 90
下设备可对周边海洋环境及目标实施监测。海洋安 500
保需要实现对水下运动目标的自主警戒,各临海国 1000 ᄰܦˁ ॖӝ 80
๒᭧Ԧ࠱
家纷纷推出海洋发展战略和海洋科技发展规划,大 1500 ܦСߛӝ 70
ງए/m
力发展对水下运动目标的探测预警装备 [1] 。然而, 2000
复杂海洋环境背景下的水下运动目标辐射声信号 2500 ๒᭧Ԧ࠱ܦ 60
ˁ๒अԦ࠱
3000 ܦСߛӝ
微弱,仅依靠水声信号处理技术对目标进行探测和 3500 50
定位面临极大的挑战。此外,深海声场深度的垂直 4000
40
分布和声影区又严重限制声呐对远距离目标的探 0 10 20 30 40 50 60
ᡰሏ/Lm
测性能,使得传统上对安静型潜艇的探测变得十分
棘手 [2] 。因此,结合深海声传播自身的特点的目标 图 2 RAP 环境下的传播损失和区域划分
Fig. 2 Sound transmission loss and regional divi-
探测和定位方法成为一种新的思路。
sion of RAP
深海声速梯度中,与海面附近最大声速相等的
深度称为临界深度 [3] 。海面海底作用对临界深度以 2 RAP声传播特性研究
深的声源辐射的声信号影响较小,声信号可以传播
到中等距离,认为该声道是 “可靠的”,故称之为可 Urick [6] 提出当海洋深处的声源声波传播至中
靠声路径 [4] 。典型深海声速梯度如图 1 所示,RAP 等距离时,会形成 “稳定的声线路径”,这是对 RAP
环境下传播损失和区域划分如图 2 所示。由图 2 可 概念最早的解释。1989 年 –2005 年期间,作为北太
以看出,对应于图 1 的声速梯度情况,当声源位于 平洋实验室项目的一部分,Worcester 等 [7] 利用垂
4200 m 时,直达声和海面反射声可以覆盖约 0 ∼ 直和水平接收阵列相结合的方式进行低频、宽频带
35 km 的近海面区域,该范围内近乎不存在声影区 的深海声波传播实验。尽管实验涉及到 RAP 的声
且传播损失较小。根据互易定理 [5] ,声源和接收位 传播,但是当时并未对RAP特性进行更进一步的研