
Page 9 - 《应用声学》2022年第4期
P. 9
第 41 卷 第 4 期 沈同圣等: 可靠声路径传播特性及目标定位方法研究现状 507
结构的方法进行目标定位。因此,针对不同的观测 Li等 [29] 根据“多径时延比”提出了一种深海垂直阵
平台,研究学者提出了与其对应的信号处理方法和 目标深度估计方法。对于基于垂直阵的 RAP 目标
目标定位算法。 定位方法而言,其利用了环境与目标在时域与空间
(1) 针对单阵元情况,Yang 等 [21] 提出了基于 上的差异,计算简便且垂直阵布放回收机动灵活,目
时延互相关函数的定位方法。该方法利用不同位置 前仍被广泛使用。
下声源辐射的直达声和海面反射声声场的互相关 上述方法都与接收声信号的多径到达结构有
函数对目标进行测距,且主要的限制来源于接收信 关,研究内容和侧重点集中在直达声和海面一次反
号信噪比的大小和声压互相关的时间增量的选择, 射声到达角度、时延差等。由于海底反射的声信号
模型误差对目标参数估计误差起较大作用。此外, 到达振幅较弱且时间分布很广,通常无法获得。对
Duan 等 [22] 提出了基于直达波 -海面反射波时延的 于远距离目标而言,直达声与海面一次反射声到达
运动声源定位方法。该方法可以仅利用较为稳定的 时延差较小且难以分辨,声信号到达俯仰角随距离
D-SR 峰值信息就可以准确估计运动声源的距离、 的增加变化缓慢,这就导致对于远距离目标,利用多
深度和速度,但是对时延分辨率要求较高且目标必 途到达结构的目标定位方法近乎失效。此外,RAP
须为运动的。孙梅等 [23−24] 研究了水平、垂直振速 下基于多途到达时延的目标定位方法对声源深度
声能的传播损失与声线掠射角、声源距离之间的变 和声源距离变化比较敏感,而获取声信号的时延
化关系,提出了一种基于矢量水听器的水平与垂直 信息对信号带宽和信噪比要求较高,适用于对高信
振速的能量差估计声源距离的方法。结果表明,该 噪比的目标进行定位,故基于多途到达结构的深海
方法对近距离目标测距效果良好。尽管该方法测距 RAP定位方法仍有待进一步改进。
精度受方位估计精度影响较大,但其利用声压振速 3.1.2 RAP下基于频域干涉条纹的定位方法
能量差的方法为 RAP 下声矢量信号的处理提供了
RAP环境下有一种被称为“RAP干涉条纹”的
思路。
条纹现象:声源做水平运动并发射宽带信号,将布放
(2) 针对双阵元的情况,杨坤德等 [9] 提出了基
在临界深度以下海域的单个水听器接收到的信号
于多途时延差的双阵元深海匹配定位方法。该方法
频谱随声源距离的变化用伪彩图表示,可以看到明
利用两个水听器接收信号之间的互相关函数得到
暗相间的条纹 [4] ,仿真用的水文环境如图6 所示,结
多途造成的时延差信息,与构建的模型计算结果进
果如图 7 所示。围绕 RAP 下的这种干涉现象,许多
行匹配从而估计声源的位置。该算法在整个过程中
专家学者进行了相应的理论分析和实验研究。
需要人为地提取多途时延差信息,不够智能化。之
后,Lei 等 [25] 提出了基于双水听器互相关函数匹配
的目标定位方法。该方法利用稀疏重构来获取信号 1000
互相关函数的峰值结构,克服了因为实际信号带宽 2000
有限导致互相关函数中距离较近的两个峰值结构
叠加的情况,降低了定位旁瓣从而提高定位精度。 ງए/m 3000
(3) 针对垂直阵列的情况,Duan 等 [26] 提出了 4000
一种基于多途到达结构的加权子空间拟合匹配场 c b =1600 m/s
5000 ρ b =1.6 g/cm 3
定位方法。该方法利用直达波与海面反射波到达时 α b=0.15 dB/(kHzSm)
延在频域上出现明显能量周期振荡这一特性,分析 1480 1500 1520 1540 1560 1580 1600
ܦᤴ/(mSs -1 )
出频域振荡周期与声源的深度有关,从而对声源深
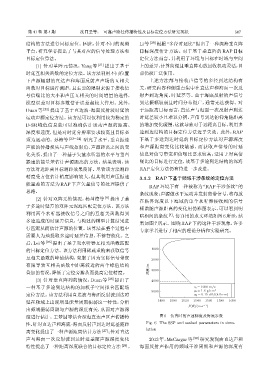
度进行估计。王梦圆等结合深海直达声区声传播特 图 6 仿真时的声速梯度及海底参数
性,针对直达声和海底-海面反射声到达时延差随距 Fig. 6 The SSP and seabed parameters in simu-
lation
离变化提出了一种声源距离估计方法 [27] ;针对直达
声与海面一次反射波到达时延差随声源深度变化 2013年,McCargar等 [30] 研究发现由直达声和
特性提出了一种距离深度联合的目标定位方法 [28] 。 海面反射声作用的频域干涉周期和声源的深度有