
Page 7 - 《应用声学》2022年第4期
P. 7
第 41 卷 第 4 期 沈同圣等: 可靠声路径传播特性及目标定位方法研究现状 505
究。RAP 最早应用在美国建立的深海海啸灾害监 (200 Hz 以下) 环境噪声比临界深度以上海域的低
测系统,该系统提供了远程监测海啸的能力,在海 频环境噪声低约 20 dB,这一现象用 Snell 定律解释
啸监测方面发挥着重要的作用。2004年发生的印度 为是由远处 (超过 200 km) 舰船噪声无法穿透到临
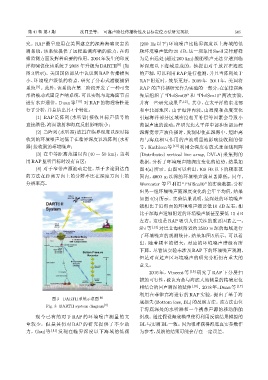
洋海啸促使该系统于2008 年升级为DARTII [8] (如 界深度以下海域造成的。他提出对于放置在海底
图 3 所示)。美国国防部从中认识到 RAP 传播损失 的声源,可以利用 RAP 进行检测,并且当阵列处于
小、环境噪声级低的特点,研究了分布式潜艇捕猎 RAP 附近时,效果更好。2009 年 –2011 年,美国将
系统 [9] 。此外,该系统在第二阶段开发了一种可变 RAP 的声传播研究作为实验的一部分,在菲律宾海
形的被动式固定声呐系统,可以实现与近海面节点 先后组织了 “PhilSea09” 和 “PhilSea10” 两次实验,
进行水声通信。Duan 等 [10] 对 RAP 的物理特性进 并有一些研究成果 [7,12] 。其中,在太平洋的东北部
行了分析,并总结出其4个特征: 和中北部地区,由于海洋内波、由温度和盐度变化
(1) RAP 是阵列 (水听器) 接收目标声信号的 引起海洋部分区域密度相互补偿等因素会导致小
直接路径,海面散射和海底反射影响较小; 范围声速的波动;在研究北太平洋中部和东部远程
(2) 当阵列 (水听器) 放置在临界深度以深时接 深海宽带声波传播时,发现即使在深海中,短距离
收到的环境噪声远低于在临界深度以浅阵列 (水听 内与海底相互作用的声波明显地影响接收到的信
器)接收到的环境噪声; 号。Kathleen 等 [13] 利用全深度布放式垂直线列阵
(3) 在中等距离范围以内 (40 ∼ 50 km),当利 (Distributed vertical line array, DVLA) 采集到的
用RAP监听目标时没有盲区; 数据,分析了环境噪声随深度变化的趋势,结果如
(4) 对于窄带声源被动定位,基于多途到达角 图 4(a) 所示。由图可以看出,100 Hz 以下的频率范
的方法在距离方向上的分辨率比在深度方向上的 围内,4000 m 以深的环境噪声级显著降低。同年,
分辨率高。 Worcester 等 [7] 利用“PhilSea10”的实验数据,分析
出另一组环境噪声随深度变化的全年平均值,结果
如图 4(b) 所示。实验结果说明,最深处的环境噪声
级相比于近海面的环境噪声级要低 10 dB 左右,相
比于深海声道轴附近的环境噪声级甚至要低 15 dB
左右。这也是 RAP 吸引人们关注的重要因素之一。
Shi 等 [14] 对巴士海峡附近约 3500 m 深的海域进行
了环境噪声的观测统计,结果如图 5 所示。可以看
出,随着频率的增大,对应的环境噪声谱级有所
下降。尽管该实验未涉及 RAP 下的环境噪声观测,
但是对直达声区环境噪声的研究分析仍有重大的
意义。
2016 年,Vincent 等 [15] 研究了 RAP 下分层扫
描的可行性,被认为是与海底大地测量的精确定位
相结合的回声测深的延伸 [16] 。2018年,Duan等 [17]
利用在菲律宾海进行的 RAP 实验,提出了基于海
图 3 DARTII 系统示意图 [8]
底损失(Bottom loss, BL)的反演方法。该方法由位
Fig. 3 DARTII system diagram [8]
于海底深处的水听器和一个携带声源的移动船舶
现今已有的对于 RAP 的环境噪声测量的文 组成。通过假设海底模型使得利用反演结果模拟的
章较少,但是其仍对 RAP 的研究提供了不少助 BL与实测BL一致。因为很难获得海底真实参数作
力。Gaul 等 [11] 发现在临界深度以下海域的低频 为参考,反演的结果可能会存在一定误差。