
Page 8 - 《应用声学》2022年第4期
P. 8
506 2022 年 7 月
0 0
1 1
2 2
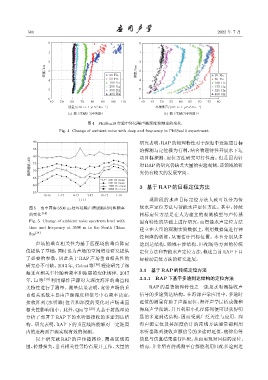
ງए/km 3 20 Hz ງए/km 3 20 Hz
4 50 Hz 4 50 Hz
100 Hz 100 Hz
200 Hz 175 Hz
5 300 Hz 5 325 Hz
400 Hz 400 Hz
6 6
40 50 60 70 80 90 100 110 40 45 50 55 60 65 70 75 80
2
2
ିਈ/(dB re 1 mPa SHz -1 ) ߌᄮല/(dB re 1 mPa SHz -1 )
(a) ̆[13]˗ᄊڏ4 (b) ̆[7]˗ᄊڏ14
图 4 PhilSea10 实验中环境噪声随深度和频率的变化
Fig. 4 Change of ambient noise with deep and frequency in PhilSea10 experiment
90 研究表明,RAP的物理特性对于深海中近距离目标
85
的探测与定位极为有利,结合物理特性开展水下运
80 动目标探测、定位方法研究可行性高。但是国内针
٪ܦ៨ጟ/dB 75 对RAP的研究仍缺乏大量的实验观测,该领域的研
70
究仍有较大的发展空间。
65
200 Hz mean
500 Hz mean
60 1000 Hz mean 3 基于RAP的目标定位方法
2000 Hz mean
55
10-16 1-17 4-17 7-17 10-17 1-18
థ-ெ 现阶段的水声目标定位方法大致可以分为传
图 5 南中国海 3500 m 处环境噪声谱级随时间和频率 统水声定位方法与智能水声定位方法。其中,传统
的变化 [14] 目标定位方法是在人为建立的观测模型与声传播
Fig. 5 Change of ambient noise spectrum level with 固有特性的基础上进行研究,而智能水声定位方法
time and frequency at 3500 m in the South China
建立在大量的观测实验数据上,利用数据集进行神
Sea [14]
经网络的训练,从而估计目标位置。本节分别从多
声场的垂直相关性为基于匹配场的垂直阵定 途到达结构、频域干涉结构、匹配场等方面的传统
位提供了基础,同时也为声场的空间增益研究提供 定位方法和智能水声定位方法,概述当前RAP下目
了必要的参数,因此关于 RAP 声场垂直相关性的 标被动定位方法的研究进展。
研究必不可缺。2013年, Colosi等 [18] 理论研究了深
3.1 基于RAP的传统定位方法
海垂直相关半径随着频率和距离的变化规律。2017
年,Li 等 [19] 利用爆炸声源对大深度海洋的垂直相 3.1.1 RAP下基于多途到达结构的定位方法
关特性进行了测量。测量结果表明,宽带声场的垂 RAP 的显著物理特性之一就是水听器接收声
直相关系数主要由声源深度和信号中心频率决定, 信号的多途到达结构。在海洋声学应用中,多途时
接收阵列 (水听器) 位置和深度的变化对声场垂直 延值的测量有助于声源定位、海洋声学层析成像和
相关性影响很小。此外,Qiu 等 [20] 人基于射线理论 海底声学反演,并且利用小孔径阵列便可以获得明
分析了部署于 RAP 下的水听器接收的多途到达结 显的多途到达结构,因而受到广泛关注与应用。深
构。研究表明,RAP 下的垂直线阵能够对一定距离 海声源定位及其深度估计的常规方法通常都利用
内的近海面声源实现有效的探测。 水听器阵列接收声源信号的多途时延值、俯仰角等
以上研究就 RAP 的声传播路径、覆盖区域范 信息与仿真结果进行匹配,从而实现对目标的定位。
围、传播损失、垂直相关性等特点展开工作,大量的 然而,并非所有的观测平台都能利用匹配多途到达