
Page 27 - 《应用声学》2022年第5期
P. 27
第 41 卷 第 5 期 闫博等: 流动微泡群瞬态空化强度时域分布的比例反馈调节 703
ICI = Q s − Q c . (5) 脉冲激励信号的电压幅度值通过以下策略进行
调整:
1.4 流动微泡群瞬态空化强度时域分布的调控
策略 U i+1 = U i − K · ∆ICI i , (7)
流动微泡群的 ICI 与脉冲超声的 PNP、PRF 其中,K 为比例系数。在脉冲超声作用的整个时间
和 PL 密切相关:ICI 会随着 PNP 和 PL 的增大而增 内,脉冲激励信号的电压值 (峰值负压值) 都按照该
大;ICI 与 PRF 的关系见 2.1.2 节。这里考虑在保持 方法进行,以获取时间域均匀分布的ICI。
PRF 和 PL 为定值的情况下,通过调节 PNP 以实 1.5 流动微泡群瞬态空化强度的控制性能分析
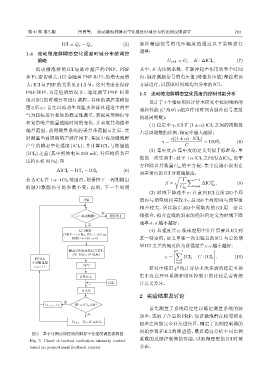
现对 ICI 的时域分布进行调控。具体的调控策略如
设计了4 个指标用以评价本研究中控制策略的
图 3 所示:首先以流动生理盐水和流体通道中的空
调控性能 (C 为 60 s 超声作用时间内脉冲信号发射
气为目标进行系统的稳定性测量,获取其基频信号
的总周期数):
和宽带噪声能量值随时间的变化,并求取其均值和 (1) 稳定率γ:ICI在(1 ± α)·ICI t 之间的周期数
偏差范围,获得测量系统的误差带范围 α 之后,实 占总周期数的比例,稳定率越大越好;
时测量当前周期的声波作用下,焦区中流动微泡群 c[(1 ± α) · ICI t ]
γ = × 100%. (8)
产生的瞬态空化强度 (ICI i ),并计算 ICI i 与期望值 C
(2) 集中度 β:集中度的定义类似于标准差,单
(ICI t ) 之差 (其中初始电压 150 mV,对应峰值负声
独的一次实验中,处于 ±α·ICI t 之间的 ∆ICI in 的平
压约0.45 MPa),即
方和除以其数量 C in 的平方根,集中度越小说明在
∆ICI i = ICI i − ICI t . (6)
误差带内的ICI分布越紧凑:
√
若 ∆ICI i 在 ±α · ICI t 范围内,则保持下一周期输出 1 ∑ c−1 2
β = ∆ICI . (9)
in
的脉冲激励信号的参数不变;否则,下一个周期 C in i=0
(3) 时域下降速率 σ:注意到 ICI 在前 250 个周
नݽ 期内与期望值相差较小,后 350 个周期内与期望值
相差较大,所以将后 350 个周期内的 ICI 用一条直
ա
i < ևర? ሮऀጼൣ 线拟合,拟合直线的斜率的绝对值定义为时域下降
速率σ,σ 越小越好。
௧
ηՂԧ࠱ (4) 总强度差 ε:临床应用中往往需要总 ICI 到
(PRF=10 Hz, PL=100 µs,
ѺݽU=150 mV) 某一特定值,定义单独一次实验总的 ICI 与总的期
望ICI之差的绝对值为总强度差ε,ε越小越好:
ᅯগቇӑԧၷԣηՂ᧔ᬷ C−1
(50 MHz, 8192ག) ∑ (10)
FPGA ε = ICI i − C · ICI t .
˗ូடႃԍ i=0
i/i⇁ FFT 2
研究中使用 χ 统计评估多次实验的稳定率和
集中度在开环系统和闭环控制中的比较是否有统
ᝠካICI i
- ICI t 计意义差异。
DICI i
2 实验结果及讨论
௧
U i⇁=U i ښ±α·ICI t ˨ᫎὝ
首先测量了系统稳定性以确定测量系统的波
ա
动率,选取了合适的 PRF,保证微泡群在相邻两束
超声之间能完全补充进焦区,确定了比例控制器的
U i⇁/U i֓KSDICI i
初始参数和 ICI 的期望值,最后通过分析不同比例
图 3 基于比例反馈控制的瞬态空化强度调控流程图
系数的反馈控制器的性能,以取得理想的 ICI 时域
Fig. 3 Chart of inertial cavitation intensity control
based on proportional feedback control 分布。