
Page 50 - 《应用声学》2023年第1期
P. 50
46 2023 年 1 月
2.5 力学部分 2.6 声学部分
平衡电枢的力学部分主要集中在平衡电枢的 平衡电枢的声学部分主要取决于平衡电枢本
悬臂受力 F ϕ (x, i)。平衡电枢的悬臂在气隙平面 A 身的声学结构、腔体本身的设计。最后产生的声阻
受到上下两个磁通 ϕ 1 和 ϕ 2 的影响,根据磁场磁通 抗可以折合成Z load (s),
对电枢的作用力公式,可以写出悬臂在磁场中的总 ( 1 )
受力F ϕ (x, i) 的公式,得到 Z load (s) = R a + j ωM a − ωC a , (23)
ϕ 2 1 ϕ 2 其中,R a 、M a 、C a 分别为声阻、声质量及声容(或声顺)。
2
F ϕ (x, i) = −
2µ 0 A 2µ 0 A
2.7 空间状态方程
= K ϕ (x)x + T x (x, i)i. (20)
受力 F ϕ (x, i) 通过计算合并式 (20) 之后可以分 把式 (17)、式 (20) 和式 (22) 联立求解,可以写
出包含主要变量电流 i、位移 x、速度 u 的方程并画
为两个部分。其中K ϕ (x)代表电枢悬臂在力F ϕ (x, i)
影响下,与 x 相关的非线性磁刚度补偿;T x (x, i) 代 出集总参数模型图,
表悬臂上因为线圈电流产生的作用力系数,与 E in = R e i + L x (x, i) di + T x (x, i) dx ,
dt dt
式 (19) 位移和电流 i 相关的非线性电机耦合因子
T x (x, i)相等。 F ϕ (x, i) = K ϕ (x)x + T x (x, i)i (24)
通 过 计 算 合 并 式 (19) 和 式 (20), 可 以 得 出
du
K ϕ (x), = M ms dt + R ms u + K a x.
2
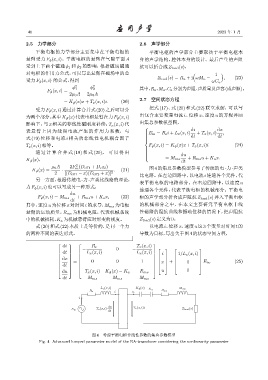
µ 0 A 2F (D eff1 + D eff2 ) 图4 的集总参数模型参考了传统的电 -力-声类
m
K ϕ (x) = · . (21)
2 [(D eff1 − x)(D eff2 + x)] 2
比电路。在左边回路中,以电流 i 连通各个元件,代
另一方面,根据传统电-力-声类比线路的理论,
表平衡电枢的电路部分。在右边回路中,以速度 u
力F ϕ (x, i)也可以写成另一种形式,
连通各个元件,代表平衡电枢的机械部分。平衡电
du
F ϕ (x, i) = M ms + R ms u + K a x, (22) 枢的声学部分折合成声阻抗 Z load (s) 并入平衡电枢
dt
其中,速度 u 为位移 x 对时间 t 的求导,M ms 为电枢 的机械部分之中,在本文主要研究平衡电枢非线
悬臂的运动质量,R ms 为机械电阻,代表机械系统 性磁路的阻抗曲线和振动位移的情况下,把声阻抗
中的机械损耗,K a 为机械悬臂应对形变的刚度。 Z load (s)定义为0。
式(20) 和式 (22) 本质上是等价的,是同一个力 以电流 i、位移 x、速度 u 这 3 个变量对时间 t 的
的两种不同的表达形式。 导数为目标,写出关于图4的状态空间方程,
di R e T x (x, i)
− 0 −
dt L x (x, i) L x (x, i) i 1/L x (x, i)
dx
= 0 0 1 0 E in . (25)
x +
dt
u 0
du T x (x, i) K ϕ (x) − K a R ms
−
dt M ms M ms M ms
L x↼x֒i↽ K φ↼x↽ M ms
K a
R e i u R ms
i
dx
T x↼x֒i↽ T x↼x֒i↽i Z load↼s↽
E in
dt
图 4 考虑平衡电枢非线性参数的集总参数模型
Fig. 4 Advanced lumped parameter model of the BA-transducer considering the nonlinearity parameter