
Page 56 - 《应用声学》2023年第2期
P. 56
244 2023 年 3 月
ဗܒ͈ ܦչԠ
0 引言
以水下蛙人、水下无人平台为代表的水下运动 ͜୧૯ܿ ຉ־
小目标是港口及近岸水域反恐的重要防范对象。为 ូட
了保障我国经济的发展和社会的安定,迫切需要发 ۳̆ଊഐဋਖᅼᄊ ܦչ
࣋ஊ
ܦչভᑟកͥവی
展智能化的水下安保系统,保障沿海设施的安全。 ງए
蛙人探测声呐不仅可以探测水下蛙人,还可实现自
ᤖ̽
动报警、监控及跟踪。在对目标进行搜索的过程中,
蛙人探测声呐的探测概率会受到作用距离的直接 ࠄᬅဗܒʾᄊ ܦչ࣋ஊງए
ଊഐဋ ᒭᤠऄ͖ӑካข
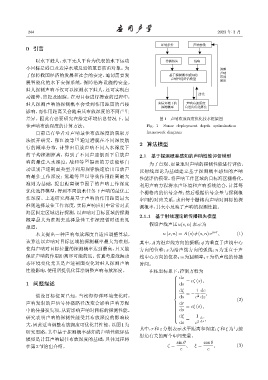
影响,而作用距离又会随着其布放深度的不同产生
差异。因此有必要研究在给定环境信息情况下,最 图 1 声呐布放深度优化技术框架图
佳声呐布放深度的计算方法。 Fig. 1 Sonar deployment depth optimization
目前已有学者对声呐最佳布放深度的获取方 framework diagram
法展开研究。郁红波等 [1] 通过潜艇在不同深度航
2 算法模型
行的概率分布,计算出吊放声呐不同入水深度下
的平均探测距离,得到了不同声速剖面下吊放声 2.1 基于探测概率感知的声呐性能评估模型
呐的最佳入水深度;战和等 [2] 提出的方法能够自 为了直观、定量地对声呐的探测性能进行评估,
动识别声速剖面类型并利用规律快速给出吊放声 以射线理论为基础建立基于探测概率感知的声呐
呐最佳工作深度;熊雄等 [3] 以等效作用距离最大 性能评估模型。将声呐工作区域的目标海区栅格化,
准则为基础,提出距离调节因子的声呐工作深度 利用声呐方程将水声环境和声呐系统结合,计算每
优化选择模型,得到不同战术任务下声呐的最优工 个栅格内的信号余量;然后根据信号余量与探测概
作深度。上述研究都是基于声呐的作用距离最大 率间的对应关系,求出每个栅格内声呐对目标的探
准则选择最佳工作深度,实际声呐应用中常常对某 测概率,其大小反映了声呐的探测性能。
海区固定区域进行探测,以声呐对目标区域的探测
2.1.1 基于射线理论的传播损失模型
概率最大为准则去选择最佳工作深度暂时还未见
假设声线声压u(s, n)表示为
报道。
本文提出一种声呐布放深度自适应调整算法, u (s, n) = A (s) ϕ (s, n) e jwτ , (1)
该算法以声呐对目标区域的探测概率最大为准则, 其中,A 为沿声线方向的振幅;ϕ为垂直于声线中心
使得声呐对目标位置的探测概率达到最高,且又能 方向的位移;s 为沿声线方向的弧线;n 为垂直于声
保证声呐的作用距离尽可能的远。仿真考虑浅海动 线中心方向的位移;w 为圆频率;τ 为沿声线的传播
态环境变化尤其是声速剖面变化对蛙人探测声呐 时间。
性能影响,使用所提优化算法调整声呐布放深度。 在柱坐标系下,控制方程为
dz
= cζ (s) ,
1 问题描述
ds
dζ 1 dc
,
假设目标位置已知,当浅海海洋环境变化时, ds = − c dz
2
声呐发射的声信号传播路径改变会影响声呐方程 dr (2)
= cξ (s) ,
中的传播损失项,从而影响声呐对目标的探测性能。 ds
dξ
研究表明声呐的探测性能受其布放深度的影响较 = − 1 dc ,
ds c 2 dr
大,因此适当调整布放深度可优化其性能。以图1为
其中,r 和z 分别表示水平距离和深度;ζ 和ξ 为与掠
研究思路,其中基于探测概率感知的声呐性能评估
射角有关的两个中间变量,
模型是计算声呐最佳布放深度的基础,具体过程将
sin θ cos θ
在第2节给出介绍。 ζ = , ξ = , (3)
c c