
Page 8 - 《应用声学》2023年第2期
P. 8
196 2023 年 3 月
测量方位角的变化关系,结合主动声呐工作原理
2 基于阵不变量的目标深度辨识算法
可以得到对应波导环境中具有阵增益的信道脉冲
响应估计。 2.1 阵不变量脉冲响应匹配
使用声源信号 s(t) 对接收信号 p B (t) 进行匹配
θ x 滤波得到信道脉冲响应的估计:
φ r
˜ (9)
h (z s , z t , r; t) = p B (t) ⊗ s(t).
结合信道匹配思想,已知主动声呐系统的布放
y
˜
深度 z s 时,将估计脉冲响应 h (z s , z t , r; t) 与考察空
z
′
′
′
′
图 2 水平阵和目标位置几何模型 间位置(z , r )处的理论声场脉冲响应h (z s , z , r ; t)
t
t
Fig. 2 Geometric model of horizontal array and target 进行互相关匹配处理,当空间位置参数和环境参数
与实际参数匹配时,可以汇聚沿各条特征声线传播
主动声呐在发射脉冲信号时,通过脉冲压缩可
的信号能量,并抑制噪声干扰,在时延域上的最大峰
以得到声信号的双程传播时间,从而计算目标距
值作为当前考察位置与实际目标位置的匹配度。
离,因此在主动声呐回波的方位历程图中,根据峰
∫
h(z s , z t , r; τ)h(z s , z t , r; τ − t)dτ
值得到双程传播时间 ˜ t 0 、传播距离估计 ˜r 0 和初始方
˜
′
′
˜
位估计 θ 0 ,则根据阵不变量得到的后续到达多径 ρ(z , r )=
h (z s , z t , r; t)
∥h (z s , z t , r; t)∥ ∞ ,
t
˜
∞ ∞
方位为 (10)
( ( ) )
˜ ˜ (7)
θ(t) = arcsin sin θ 0 + ˜χ t − ˜ t 0 .
′
′
P (z) = max {ρ (z , r )} . (11)
t
根据方位变化对各阵元的接收信号 p i (t) 进行波束 r
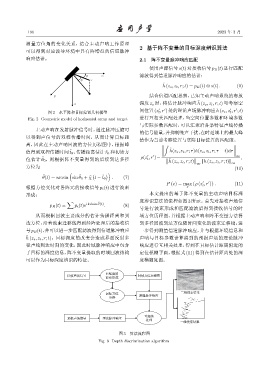
形成: 本文提出的基于阵不变量的主动声呐目标深
度辨识算法的流程如图 3 所示。首先对接收声场信
∑
p B (t) = p i (t)e ikd sin ˜ θ(t) . (8)
号进行波束形成和匹配滤波后得到接收信号的时
从而根据回波主要成分的估计传播距离和到 域方位历程图,并根据主动声呐和阵不变量方法得
达方位,沿着波束迁移线得到经阵处理后的接收信 到多径回波到达方位随时间变化的波束迁移线,进
号p B (t),并可以进一步匹配滤波得到信道脉冲响应 一步得到测量信道脉冲响应,并与根据环境信息和
˜ 声呐与目标参数计算得到的预报声场的理论脉冲
h (z s , z t , r; t)。目标深度的改变会造成界面反射多
径声线到达时刻的变化,因此时域脉冲响应中包含 响应进行互相关处理,得到在目标估计距离附近的
了目标的深度信息,阵不变量提取的时域回波结构 定位模糊平面,根据式 (11) 得到在估计距离处的深
可以作为目标深度辨识的特征。 度模糊度图。
Ӝᦡฉ
ଌஆܦڤηՂ ۫வͯԋሮڏ
ฉౌॎੇ
ᄬಖவͯ ᧚ᑢф־ऄ ̄፥ଽጊፇ౧
Ѭᣲ
̉ᄱТ
ᮕઑܦڤηՂ ေᑢф־ऄ
ܫေ
ʷ፥ଽጊፇ౧
图 3 算法流程图
Fig. 3 Depth discrimination algorithm