
Page 11 - 《应用声学》2023年第2期
P. 11
第 42 卷 第 2 期 赵鸿铭等: 阵不变量匹配主动声呐目标深度辨识 199
图8(a)∼ 图8(b)分别是对图 4 声速剖面添加随 应采用图 4 所示的实测环境参数进行声场预报后
机扰动误差后的定位结果,各自最大声速误差分别 得到。
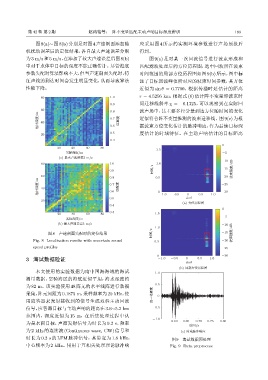
为3 m/s和5 m/s,在添加了较大声速误差后图8(b) 图 9(a) 是对某一次回波信号进行波束形成和
中对于水体中目标的深度不能正确估计。尽管海底 匹配滤波处理后的方位历程图,选中回波所在波束
参数失配对算法影响不大,但当声速剖面失配时,特 时间范围的局部方位历程图如图 9(b) 所示,图中标
征声线的到达时间会发生明显变化,从而导致算法 注了目标回波峰值所对应的波束时间参数,其方位
性能下降。 近似为 sin θ = 0.7790,根据传播时延估计的距离
r = 4.5256 km,根据式 (6) 估计阵不变量即波束时
80 1.0
0.9 间迁移线斜率 χ = −0.1325,可以观察到在实际回
波声场中,其主要多径分量到达方位随时间的变化
ͥᝠງए/m 60 0.7 Ӝᦡए 近似符合阵不变量推测的波束迁移线。图9(c)为根
0.8
40
据波束方位变化估计的脉冲响应,作为后续目标深
0.6
0.5 度估计的时域特征。在主动声呐估计的目标距离
20
0.4
0
20 40 60 80
1.5
ࠄᬅງए/m −5
(a) తܸܦᤴឨࣀ3 m/s
−10
80 1.0 1.0
ᫎ/s −15 ฉౌूए/dB
0.9 0.5 −20
ͥᝠງए/m 60 0.7 Ӝᦡए −25
0.8
40
0.6
0
0.5 0 -1.0 -0.5 sinθ 0.5 1.0 −30
20
(a) வͯԋሮڏ
0.4
0
0.3
20 40 60 80 1.5
−5
ࠄᬅງए/m
(b) తܸܦᤴឨࣀ5 m/s −10
1.0
ᫎ/s −15 ฉౌूए/dB
声速剖面失配时的定位结果
图 8
Fig. 8 Localization results with uncertain sound 0.5 −20
speed profiles −25
0 −30
3 海试数据验证 -1.0 -0.5 0 0.5 1.0
sinθ
(b) ࡍᦊவͯԋሮڏ
本文使用的实验数据为南中国海海域的海试 1.0
测量数据,实验海区的海底近似平坦,海水深度约
为 82 m。该实验使用 48 阵元的水平线阵进行数据 0.5
采集,阵元间距为0.1875 m,采样频率为 20 kHz,使 ॆʷӑࣨए 0
用应答器来发射接收到的信号生成双程主动回波
信号,应答器目标与主动声呐的距离在 3.6∼5.2 km -0.5
范围内,深度近似为 15 m,在后续处理过程中认
-1.0
为是水面目标,声源发射信号为时长为 0.2 s、频率 0.60 0.65 0.70 0.75 0.80
ᫎ/s
为 2 kHz 的连续波 (Continuous wave, CW) 信号和 (c) ۫ᑢф־ऄ
时长为 0.2 s 的 LFM 脉冲信号,其带宽为 1.8 kHz, 图 9 海试数据预处理
中心频率为 2 kHz。用用于互相关处理理论脉冲响 Fig. 9 Data preprocess