
Page 9 - 《应用声学》2023年第2期
P. 9
第 42 卷 第 2 期 赵鸿铭等: 阵不变量匹配主动声呐目标深度辨识 197
2.2 数值仿真 移线所指示的多径方位变化得到修正的时域脉冲
使用 KRAKEN声场计算程序仿真浅海波导环 响应的估计,并按式 (10) 计算在估计距离附近空间
境中的主动声呐回波,并验证本文提出的深度辨 各位置的匹配度。
识方法性能。仿真环境的具体参数如图 4 所示,使 0
用的水体声速分布为南中国海海域实验测得声速, 4.6 ϙฉౌ־ऄ
ฉౌᫎረ
水体深度为 82 m,目标距离主动声呐 3 km,仿真 −10
4.4
使用的主动声呐设备参数如表 1 所示,目标所在方
位与水平线阵正横方向夹角为 60 ,48 阵元水平阵 ᫎ/s 4.2 −20 ฉౌूए/dB
◦
的阵元间距为 0.1875 m,深度为 15 m,声源发射频 4.0
−30
带为 1100∼2900 Hz 的线性调频 (Linear frequency
3.8
modulation, LFM) 信号,考察对不同深度目标回波
-1.0 -0.5 0 0.5 1.0 −40
的算法处理性能,在仿真回波中添加高斯噪声,设置
sinθ
接收信噪比为0 dB。 (a) ͌ᄾவͯԋሮڏ
0
c⊳(mSs -1 )
4.20 ϙฉౌ־ऄ
1530 1540 −5
0 ฉౌᫎጳ
z r =15 m 4.15
ᄬಖ r=3 km ඵࣱ 4.10 −10
ງए/m ᫎ/s 4.05 −15 ฉౌूए/dB
4.00 −20
๒ඵ
82 3.95
c =1700 m/s ρ =1.9 g/cm 3 α=0.2 dB/λ ๒अ −25
3.90
−30
0.7 0.8 0.9 1.0
图 4 仿真环境
sinθ
Fig. 4 Environment model of simulation (b) ࡍᦊவͯԋሮڏ
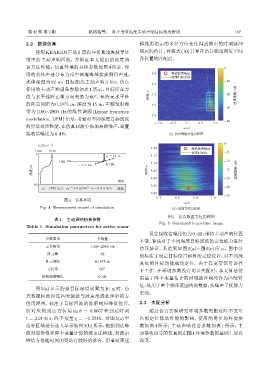
图 5 仿真数据方位历程图
表 1 主动声呐仿真参数
Fig. 5 Simulated beam-time image
Table 1 Simulation parameters for active sonar
设定接收信噪比仍为0 dB,保持主动声呐位置
参数类别 参数值
不变,算法对于不同深度目标回波的定位能力进行
工作频带 1100∼2900 Hz
仿真验证,其结果如图 6(a)∼ 图 6(c) 所示,图中分
阵元数 48
别标注了设定目标位置和算法定位位置,对不同深
阵元间距 0.1875 m
度处的目标均能成功定位。由于在宽带信号条件
方位角 60 ◦
下工作,在环境参数没有明显失配时,本文算法使
接收端信噪比 0 dB 用基于阵不变量估计的时域脉冲响应作为匹配特
征,使用了整个频带范围内的数据,抗噪声干扰能力
图 5(a) 显示的是目标深度设置为 10 m 时,仿
更强。
真数据回波经过匹配滤波与波束形成处理后的方
位历程图,标注了目标回波的波束响应峰值位置, 2.3 失配分析
所对应的到达方位角 sin θ = 0.8667 和到达时刻 通过仿真实验研究环境参数失配对阵不变量
t = 3.9116 s,阵不变量 χ = −0.2216。对图 5(a) 中 匹配定位算法性能的影响,使用的拷贝场环境参
选中区域进行放大显示如图 5(b) 所示,根据到达峰 数如图 4 所示,主动声呐设备参数如表 1 所示,主
值对应参数和阵不变量计算的波束迁移线,对波束 动接收信号的仿真则在图 4 环境参数的基础上加以
峰值方位随时间的变动有较好的拟合。沿着波束迁 改变。