
Page 6 - 《应用声学》2023年第3期
P. 6
444 2023 年 5 月
了令水平线阵绕轴向机动,根据机动前后阵列测向
0 引言
结果相对于参考声速的变化曲线,修正由于参考声
目标运动分析(Target motion analysis, TMA) 速选取偏差导致的测向误差的方法。当目标静止或
一直以来都是水声领域研究的热点问题,其中纯方 运动较慢时参考声速短时间内变化不大,此方法校
位目标运动分析 [1−9] (Bearings only target motion 准获得的参考声速可以提高此范围内测向的精度。
analysis, BOTMA) 方法只需利用目标的方位信息 但是对于目标运动较快时,参考声速变化较大,此时
就可以实现对目标位置、运动参数的估计,因而实 校准参考声速需要阵列多次机动,代价较高。
现相对简单,在工程上得到了广泛应用。由于观 为了校准参考声速,提高目标角度估计精度,
测站测量的目标方位是 BOTMA 方法唯一可利用 本文提出了将声传播相速度作为估计状态量,改
的信息,因此观测站测量的目标方位精度将影响 善了由于参考声速选取偏差导致的测向误差的问
BOTMA 的性能,通常随着测量方位误差的增加, 题,同时提高了 BOTMA 的跟踪性能。文章首先分
BOTMA性能快速下降。 析了参考声速对传统水平线列阵被动测向精度的
为了解决目标方位估计误差造成的 BOTMA 影响,给出了在确知环境下的两种理论参考声速
性能下降的问题,提高基阵被动测向精度是一个重 计算方法,而后推导了一种水平线列阵方位 -相速
要的研究方向。已有相关的科研人员研究了影响基 度联合的纯方位扩展卡尔曼滤波 (Cs bearing only
阵被动测向精度的因素,并取得了一定的研究成果。 extended Kalman filter, Cs-BO-EKF) 方法,仿真
宫在晓等 [10] 指出参考声速的选取是否准确对传统 结果表明,Cs-BO-EKF 方法在跟踪过程中实时估
的水平线列阵被动测向结果有很大的影响,此影响 计相速度,提高了测向精度,相比纯方位扩展卡尔
与信号的入射方向有关:对目标信号近基阵端射方 曼滤波(Bearing only extended Kalman filter, BO-
向入射时产生的影响大于信号近基阵正横方向入 EKF) 算法,降低了受测向误差的影响,具有更高的
射时的影响,并基于简正波理论指出由于浅海中声 跟踪精度及稳健的跟踪性能,具有较好的应用前景。
波是以多模态形式传播,参考声速与接收阵处的相
速度密切相关,其中相速度大小是由声源频率、声源
1 参考声速对水平线列阵测向精度影响的
距离、收发深度和传播信道等因素决定。由于被动
理论分析
测向时声源距离未知,因此在对目标角度估计时选
取的参考声速与接收阵处的相速度往往存在偏差,
传统的水平均匀直线阵被动测向法,是基于信
从而影响基阵测向精度 [11] 。
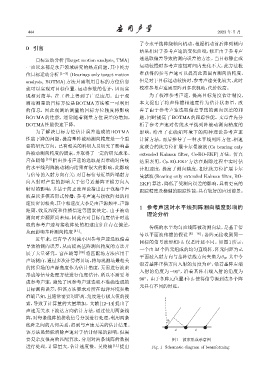
号以平面波传播的假设 [15−16] :各阵元接收到同一
近年来,已有学者对减小因参考声速选取偏差
目标的信号波形相同,仅是时延不同。如图 1 所示,
导致的测向误差,从而提高基阵测向精度的方法开
一个由 M 个阵元组成的均匀直线阵,阵元间距为d,
展了大量研究。宫在晓等 [10] 将匹配场方法应用于
平面波入射方向与基阵法线方向夹角为 θ 0 ,其中令
声场测向,通过多次计算拷贝场,将与观测场最相关
沿着基阵正横方向入射的角度为 0 ,沿着基阵左端
◦
的拷贝场的声源角度作为估计角度,无需进行波束
入射的角度为 −90 ,沿着基阵右端入射的角度为
◦
形成等信号处理方法进行角度估计,所以不需要考
90 。由于各阵元位置不同,使得信号源到达各个阵
◦
虑参考声速,避免了因参考声速选取不准确造成的
元具有不同的时延。
目标测向误差,但该方法要求对所在海洋环境参数
准确已知,且通常需要对距离、角度进行极大值的搜
索,导致了计算量的大量增加。文献 [12–14] 提出了
声速无关水下波达方向估计方法,通过使用两条线
阵,对每条线阵的接收信号分别进行处理,利用两条
θ
线阵之间的几何关系,得到与声速无关的估计结果。
该方法虽然能消除声速对于估计结果的影响,但需 d d
要复杂度很高的匹配算法,分别对两条线阵的数据 图 1 波束形成示意图
进行处理,计算量大,估计速度慢。吴俊楠 [11] 提出 Fig. 1 Schematic diagram of beamforming