
Page 7 - 《应用声学》2023年第3期
P. 7
第 42 卷 第 3 期 李鑫等: 水平线列阵方位 -相速度联合的卡尔曼滤波方法 445
设首阵元为参考阵元,接收到的信号为 x 1 (t), 分别从简正波幅度加权和波束形成两个方面,给出
则第m号阵元接收到的信号为 在确知环境下的理论参考声速的计算方法。
x m (t) = x 1 (t + τ m (θ 0 )), (1) 2.1 简正波幅度加权法
其中,τ m (θ 0 )为第m号阵元相对于参考阵元的时延, 根据简正波理论,声场中任一点处的声压是声
源激发的多号简正波叠加的结果,即 [17]
(m − 1)d sin θ 0
τ m (θ 0 ) = , (2) ∑ L
c p (r, z) = p l , (5)
其中,c为参考声速。声信号到达不同阵元的时延是 l=1
其中,p l 为声源激发的第号简正波,令c pl 为第l 号简
确定值,假设对应于信号真实入射角θ 0 的参考声速
正波的相速度。将各号简正波的相对能量作为加权
为 c 0 ,在实际计算中如果选用参考声速为 c 1 ,根据
因子对相应号数的相速度进行加权并求和,作为该
式(2)计算得到的角度为θ 1 ,则它们满足下述公式:
位置处的理论参考声速c s ,即
sin θ 0 sin θ 1
= , (3) 2
∑ L
c 0 c 1 |p l |
c s (r, z) = c pl . (6)
sin(θ 0 + ∆θ) l=1 ∑ L 2
sin θ 0
= . (4) |p l |
c 0 c 0 + ∆c l=1
2.2 波束形成计算法
由式 (4) 可知由于选取的参考声速 c 1 相对于 c 0
产生了 ∆c 的偏差,导致测向结果相对于真值产生 已知目标距离 r s 与方位 θ s ,选取声速搜索序
了∆θ 的偏差。当信号以不同的角度入射时,选取的 列,如 [c 1 , c 2 , · · · , c n ],由于声信号到达不同阵元间
参考声速在不同的偏差的情况下所产生的测向偏 的时延值τ 固定,即
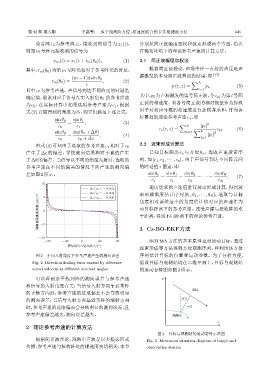
差如图2所示。 sin θ s sin θ 1 sin θ 2 sin θ N
= = = · · · = . (7)
c s c 1 c 2 c N
10
Dc⊳c =-0.002 遍历选取的声速值进行波束形成计算,得到波
Dc⊳c =-0.004 束形成角度估计序列 [θ 1 , θ 2 , · · · , θ N ],选取与目标
ϠሏηՂᄾࠄᝈए Dθ/(O) -5 0 该目标距离下的参考声速。改变声源与接收阵的水
5
Dc⊳c =-0.006
角度相对误差最小的角度估计值对应的声速作为
平距离,得到不同距离下的理论参考声速。
-10 3 Cs-BO-EKF方法
-90 -45 0 45 90 BOTMA 方法的基本原理是对运动目标,通过
ηՂᄾࠄК࠱ᝈए θ/(O)
波束形成等方法得到方位观测序列,并利用该方位
图 2 不同入射角度下参考声速产生的测向误差 序列估计目标的位置和运动参数。为了分析方便,
Fig. 2 Direction finding error caused by reference 假设目标与观测站均在二维平面上,目标与观测站
sound velocity at different incident angles 的运动态势图如图3所示。
可以看到水平线列阵的测向误差与参考声速 y
和信号的入射角度有关,当信号入射方向靠近基阵
ᄬಖ
的正横方向时,参考声速的选取偏差不会导致明显
的测向误差;当信号入射方向靠近基阵的端射方向 β↼t↽
时,参考声速的选取偏差会导致明显的测向误差,且 r↼t↽
参考声速偏差越大,测向误差越大。 ባ
x
2 理论参考声速的计算方法
图 3 目标与观测站的运动态势示意图
根据简正波理论,浅海中声波是以多模态形式 Fig. 3 Movement situation diagram of target and
传播,参考声速与接收阵处的相速度密切相关,本节 observation station