
Page 72 - 《应用声学》2023年第4期
P. 72
734 2023 年 7 月
限转换和正余弦转换模块,坐标转换和相位转换模
4 FPGA实现与实验验证
块将迭代角度范围扩展至 0 ∼ 360 。两路信号处
◦
◦
4.1 FPGA实现方案 理电路,均采用同一个 CORDIC 模块产生的正交
本振信号来实现同频同相。使用 IIR 滤波给两路信
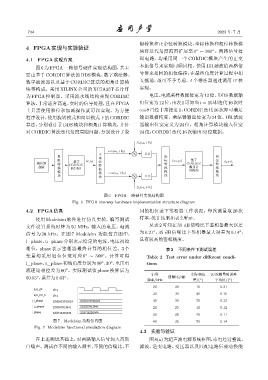
图 6 为 FPGA 一路信号硬件实现结构图,其主
要由基于 CORDIC 算法的 DDS 模块、数字乘法器、 号带来相同的相位偏移,在最终角度计算过程中相
数字滤波器以及基于 CORDIC 算法的相角计算模 互抵消,故可不予考虑。4 个乘法器通过调用 IP 核
块等构成。采用 XILINX 公司的 XC7A35T 芯片作 实现。
为 FPGA 控制器。采用流水线结构实现 CORDIC 电压、电流采样数据位宽为12位。DDS数据输
算法,非常适合高速、实时的信号处理,且在 FPGA 出位宽为12位,由表1 可知当 i = 15 即迭代 16次时
上只需使用移位和加减操作就可以实现。为方便 cos θ 已经非常接近 1,CORDIC迭代 16次即可满足
程序设计,使用旋转模式和向量模式下的 CORDIC 输出数据精度。乘法器输出位宽为 24 位。IIR 滤波
算法,分别设计了 DDS 模块和相角计算模块,并针 器输出位宽定义为 24 位。相角计算模块输入位宽
对CORDIC算法迭代角度局限问题,分别设计了象 24位,CORDIC迭代16次输出32位数据。
S a (ω n +θ )
sin(ω n+θ )
IIR
៶ گ ᄱ
ᬍ ۳̆ ↼x֒y↽ ಖ ↼x ֒y ↽ ۳̆ ͯ
ᄱͯግ ᣁ CORDIC ऺ ᣁ CORDIC ᣁ θ +θ
ҫ٨ ૱ ᄊDDS ᣁ ૱ ᄱᝈᝠ ૱
૱
വ വ cos(ω n+θ ) വ ካവڱ വ
ڱ ڱ IIR ڱ ڱ
S a (ω n +θ )
图 6 FPGA 一路硬件实现结构图
Fig. 6 FPGA one-way hardware implementation structure diagram
4.2 FPGA仿真 同的相位差下鉴相器工作状况。每次测量取 20 次
使用 Modelsim 软件进行仿真实验,编写测试 样本,统计结果如表2所示。
文件设置系统时钟为 50 MHz,输入的电压、电流 从表 2 可知在 30 dB 信噪比下鉴相器最大误差
◦
◦
信号为 20 kHz。在图 7 Modelsim 功能仿真图中, 为 0.21 ,35 dB 信噪比下鉴相器最大误差为 0.14 ,
i_phase、u_phase 分别表示给定的电流、电压初始 具有较高的鉴相精度。
相位,phase 表示鉴相器最终计算的相位差。3 个 表 2 不同条件下测试误差
变量均采用 32 位位宽对应 0 ∼ 360 。计算可得 Table 2 Test error under different condi-
◦
◦
i_phase、u_phase初始角度分别为90 、30 ,电压电 tions
◦
◦
流理论相位差为 60 。实际测试值 phase 换算后为
◦
信号 实际相位 20 次测量的误差
60.03 ,误差为0.03 。 信噪比/dB
◦
◦
频率/kHz 差/( ) 平均值/( )
◦
◦
20 30 10 0.21
30 30 40 0.15
40 30 70 0.17
20 35 10 0.12
30 35 40 0.11
图 7 Modelsim 功能仿真图 40 35 70 0.14
Fig. 7 Modelsim functional simulation diagram
4.3 实验与验证
在上述测试基础上,对两路输入信号加入高斯 图8(a)为超声波电源系统框图,市电经过整流、
白噪声。测试在不同的输入频率、不同的信噪比、不 滤波、逆变电路、变压器以及匹配电路后驱动换能