
Page 70 - 《应用声学》2023年第4期
P. 70
732 2023 年 7 月
其中 a i 、b j 是滤波器系数。IIR 滤波器的设计本 DSP
质就是设计一组合适的滤波器系数。由于超声
波最低频率为 20 kHz,由公式 (4)、公式 (5) 可知 x
In Out
调制信号中的交流成分频率最低为 40 kHz。使 DSP Product Scope
Filter
用专业滤波器设计工具设计滤波器。选择 Cheby-
shev TypeII 函数作为 IIR 滤波器传递函数,主要 x
设计参数:信号采样频率 F s = 1 MHz,通带频率 图 3 IIR 滤波器仿真模型
F pass = 1 kHz,截止频率 F stop = 35.7 kHz,通带 Fig. 3 IIR filter simulation model
最大衰减 5 dB,阻带最小衰减 50 dB,量化系数
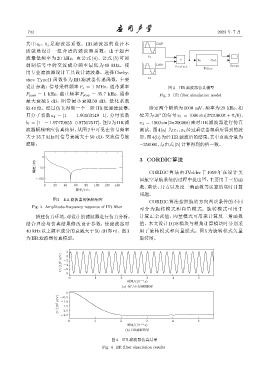
取 40 位。经过仿真得到一个二阶 IIR 低通滤波器, 给定两个幅值为 1000 mV、频率为 20 kHz、相
其分子系数 a 1 = [1 − 1.90103149 1],分母系数 位差为 30 的信号 x 1 = 1000 sin(2π20000t + π/6)、
◦
b 1 = [1 − 1.97470855 0.97502517]。图2 为IIR 滤 x 2 = 1000 sin(2π20000t) 来对 IIR 滤波器进行仿真
波器幅频响应仿真结果,从图 2 中可见在信号频率 测试。图4(a) 为x 1 、x 2 经过乘法器相乘后得到的波
大于 35.7 kHz 时信号衰减大于 50 dB,交流信号被 形,图4(b)为经IIR滤波后的结果,其中直流分量为
滤除。 −250000,与由式(5)计算得到的值一致。
0 3 CORDIC算法
ࣨए/dB -50 CORDIC 算法由 JVolder 于 1959 年在设计美
-100 国航空导航系统的过程中提出 [8] ,主要用于三角函
0 20 40 60 80 100 120 140 数、乘法、开方以及反三角函数等运算的实时计算
ᮠဋ/kHz
问题。
图 2 IIR 滤波器的幅频响应
CORDIC 算法按照旋转方向判决条件的不同
Fig. 2 Amplitude-frequency response of IIR filter
可分为旋转模式和向量模式。旋转模式可用于
搭建仿真环境,对设计的滤波器进行仿真分析, 计算正余弦值,向量模式可用来计算反三角函数
结合理论与仿真结果修改设计参数,使滤波器对 值。本文设计 DDS 模块与相角计算模块时分别采
40 kHz 以上频率成分的衰减大于 50 dB 即可。图 3 用了旋转模式和向量模式。图 5 为旋转模式矢量
为IIR滤波器仿真模型。 旋转图。
2 0
U/(10 5 mV) -2
-4
-6
-8
0 1 2 3 4 5
ᫎ/(10 -4 s)
(a) ηՂ̔ូ҄ฉॎ
0
U/(10 5 mV) -1.0
-0.5
-1.5
-2.0
-2.5
0 1 2 3 4 5
ᫎ/(10 -4 s)
(b) IIRฉፇ౧
图 4 IIR 滤波器仿真结果
Fig. 4 IIR filter simulation results