
Page 10 - 《应用声学》2023年第6期
P. 10
1120 2023 年 11 月
12 度相隔60 。参照数值仿真结果及式(2)、式(4)将水
◦
13 距调整为 11.7 mm (即:水套中探头透镜表面至水
14 套喷水口的距离) 后,在 6 个位置均可提取到狭缝
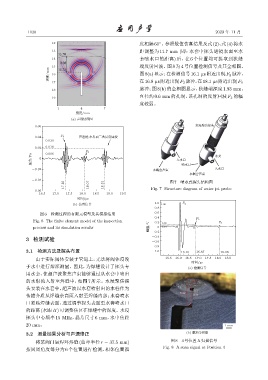
15 端反射回波。图 8 为4 号位置检测信号及其金相图。
ງए/mm 16 图 8(a) 显示:在检测信号 16.1 µs 附近出现 F 2 脉冲,
17 在16.8 µs附近出现F 3 脉冲,在18.1 µs附近出现F 4
脉冲;图 8(b) 的金相图显示,狭缝端深度 1.93 mm、
18
直径约 0.6 mm 的孔洞,该孔洞的反射回波 F 3 的幅
19
度较弱。
1 4 7
ࠕए/mm
(a) ܦڤঌིڏ
0.06 ඵ๓ᐑཥଊ݀
0.04 F ܦᤩ᪫-ඵႍ᭧̄Ԧ࠱ڀฉ
0.030
0.02 0.018
F
0.006
ԍҧ/Pa 0 Кඵ ඵݓ
-0.02 ඵᏹՌܦౌ إඵ Кඵ
ඵᏹՌܦౌ
-0.04 图 7 喷水式探头结构图
17.35 18.07 18.81
-0.06 Fig. 7 Structure diagram of water jet probe
16.5 17.0 17.5 18.0 18.5 19.0 19.5
ᫎ/µs
(b) ͌ᄾηՂ 1.0 1.00 F
0.8
图 6 检测过程的有限元模型及其模拟结果 0.6
0.4
Fig. 6 The finite element model of the inspection 0.2 0.08 F F
ࣨϙ/V 0 0.04
process and its simulation results -0.2
-0.4
3 检测试验
-0.6
-0.8
3.1 检测方法及探头布置 -1.0 16.10 16.85 18.08
由于实际阀体安装于管道上,无法将阀体浸没 15.5 16.0 16.5 17.0 17.5 18.0 18.5
ᫎ/µs
于水中进行熔深测量。因此,为焊缝设计了探头专 (a) ೝηՂ
用水套,使超声波聚焦声束能够通过从水套中喷出
的水射流入射至焊缝中,如图 7 所示。水浸聚焦探
头安装在水套中,超声波以水套喷射出的水柱作为
5.22
传播介质从焊缝余高面入射至焊缝内部;水套喷水 3.31
口紧贴焊缝表面,通过调整探头表面至水套喷水口
的距离(水距H)可调整焦区在焊缝中的深度。水浸
探头中心频率 15 MHz,晶片尺寸 6 mm,水中焦距
20 mm。 1 mm
3.2 测量结果分析与声速修正 (b) ᭧ᄱڏ
将某阀门唇焊环焊缝 (曲率半径 r = 37.5 mm) 图 8 4 号位置 A 扫描信号
按圆周角度等分为 6 个位置进行检测,相邻位置弧 Fig. 8 A scan signal at Position 4