
Page 179 - 《应用声学》2025年第1期
P. 179
第 44 卷 第 1 期 聂磊鑫等: 高斯过程辅助的船舶辐射噪声分类算法 175
ੱܙ
ܙࣹᬷ ࠄᬷ
ྲढ़ଢԩ٨ ి᧘С̚
g↼·↽
Ѭዝ٨ ए
σ↼·↽
ए ื
ื ᰴளሮڀॆ ए
ื
ఞழg↼·↽֗ ఞழg↼·↽ ఞழσ↼·↽
σ↼·↽ᄊԠ
̔Ԣ྅૯ܿ Ѭ࣋ԠϠࣀ ̔Ԣ྅૯ܿ
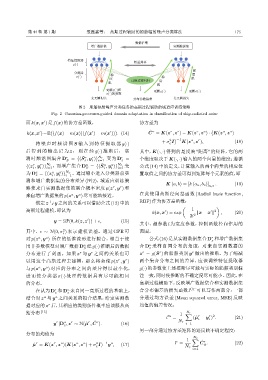
图 2 船舶辐射噪声分类任务的高斯过程辅助的域适应训练策略
Fig. 2 Gaussian-processes-guided domain adaptation in classification of ship-radiated noise
而k(x, x )是f(x)的协方差函数, 协方差为
′
( ) r r r a ( a a
ˆ r
k(x, x )=E (f(x) − m(x))(f(x ) − m(x )) . (14) C = K(z , z ) − K(z , z ) · K(z , z )
′
′
′
2
a
r
¯
将 噪 声 时 频 谱 图 S 输 入 到 特 征 提 取 器 g(·) + σ I ) −1 K(z , z ), (18)
ϵ
后 得 到 的 输 出 记 为 z, 则 在 经 g(·) 推 断 后, 实 其中,K(·, ·) 得到的是反映 “距离” 的矩阵,它的两
r
¯ r
测时频谱图集合 D r = {(S , y )} N r 变为 D = 个维度取决于 K(·, ·) 输入的两个向量的维度;遵循
r
S i i i=1 z
r r N r a ¯ a a N a
{(z , y )} ,而增广集合 D = {(S , y )} 变 公式 (14) 中的定义,计算输入的两个向量的相应位
i i i=1 S i i i=1
a a a N a 。通过缩小进入分类器前实
为 D = {(z , y )} 置取值之间的协方差可得到矩阵每个元素的值,即
z i i i=1
测和增广数据集的分布差异 (图 2),域适应训练策
K (a, b) = [k (a u , b v )] . (19)
略使来自实测数据集的联合概率密度 p(z , y ) 和 u,v
r
r
a
a
来自增广数据集的p(z , y )尽可能地接近。 在此使用高斯径向基函数 (Radial basis function,
假定z 与y 之间的关系可以借助公式(12)中的 RBF)作为协方差函数:
( )
高斯过程建模,即认为 1 ′ 2
′
k(x, x ) = exp − ∥x − x ∥ , (20)
2l 2
y = GP(0, k(z, z )) + ϵ, (15)
′
其中,超参数 l 为宽度参数,控制函数径向作用的
2
其中,ϵ ∼ N(0, σ ) 表示建模误差。通过 GPR 可 范围。
ϵ
a
a
r
对 p(z , y ) 所在的低维流形进行拟合,相当于使 公式 (16) 是从实测数据集合 D 和增广数据集
z
a
用非参数模型对增广数据 D 经 g(·) 推断后的数据 合 D 采样自同分布的角度,对来自实测数据的
a
S z
r
分布进行了刻画。如果 z 与 y 之间的关系也可 z = g(S ) 的船舶类别 y 做出的推断。为了缩减
¯ r
r
r
r
r
r
以用这个高斯过程去建模,那么将会使 p(z , y ) 两个集合分布之间的差异,应该调整特征提取器
a
与 p(z , y ) 对应的分布之间的差异得以最小化, g(·) 的参数使上述推断尽可能与实际的船舶类别标
a
进而使分类器 σ(·) 处理的数据具有尽可能相同 注一致,同时使推断的不确定度尽可能小。因此,在
的分布。 高斯过程辅助下,反映增广数据集合和实测数据集
a
在认为 D 和 D 来自同一高斯过程的基础上, 合分布偏差的损失函数 l GP 可以写作两部分:一部
r
z z
a
结合对 z 与 y 之间关系的拟合结果,给定实测数 分通过均方误差 (Mean squared error, MSE) 反映
a
据对应的z 后,其相应的类别条件概率应该服从高 均值的偏差情况:
r
斯分布 [15] 1 ∑
N r
r
r 2
l m = (ˆ µ − y ) . (21)
i i
r
r
a
r ˆ r
y |D , z ∼ N(ˆ µ , C ). (16) N r i=1
z
另一部分通过协方差矩阵的迹反映不确定程度:
分布的均值为
N r
1 ∑ ˆ r
c
a
a
r
r
a
2
y ,
ˆ µ = K(z , z )(K(z , z ) + σ I) −1 a (17) l = C . (22)
ii
ϵ N r
i=1