
Page 20 - 《应用声学》2025年第1期
P. 20
16 2025 年 1 月
n
检测,将能接收到缺陷回波的阵元范围限制在缺陷 1 ∑
I(x, z) = s i [t i (x, z)]. (4)
的正上方附近区域,以抑制图像畸变。尽管如此,在 n
i=1
检测截面中存在多个目标的情况下,由于多重散射 由此即实现了声束在目标点处的聚焦。进一步地,
的存在,成像结果仍会受到一定的影响 [13] 。另一种
通过对厚度截面上各点进行遍历,选取不同的目
方式是对其进行有效的波束形成。对于单阵元探头,
标点并按上述流程进行计算,可以获得完整的截面
可以采用几何聚焦 (如曲面聚焦、声透镜聚焦、反射
图像。
镜聚焦) [5] 对其发出的声束进行控制,使其能量始终
L
汇聚在目标点所在的位置。采用具备多个阵元的相 ᢛ᧿ս㖞
ĂĂ
控阵探头或使用一定的数据后处理技术同样可以 O (x 1 , 0) (x i , 0) (x n , 0) x
实现这一目的,具体内容将在后文进行论述。 β 0.5 β 0.5
1.1.3 单探头合成孔径聚焦成像
ᓖ
合成孔径聚焦技术 (Synthetic aperture focus- ᡚ
༠൪㤳ത ༠൪㤳ത 䶒
ing technology, SAFT) 通过采用图像重建算法对
探头在各检测点采集到的数据进行处理,能够实现 ⴞḷ⛩ (x֒ z↽
A 扫信号在目标检测区域的聚焦 [14] ,从而解决常 L L
z
规单探头B 扫存在的图像畸变问题。该方法结合了
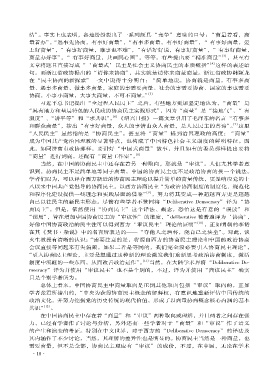
图 4 单探头 SAFT 原理图
B 扫的移动扫描方式与延时叠加 (Delay-and-sum,
Fig. 4 Schematic of SAFT on a single probe
DAS) 的数据处理方法,利用单探头的小孔径可以
获得与大孔径阵列相当的成像效果 [15] 。 虽然 SAFT 是采用等间隔移动超声探头的方
按照数据处理的表达域,SAFT 存在时域和频 式对大孔径的线性阵列进行模拟,但是它却具有大
域之分 [16−17] 。现以时域中的SAFT为例,对方法的 孔径线性阵列所不具有的优势。理论上,波束角越
原理进行说明 [18] 。如图 4 所示,超声探头沿着结构 小,声束的指向性越好,图像的横向分辨率也就越
表面从左向右等间隔扫查,逐点向结构内部发射具 高。只有在使用较高的工作频率和大孔径探头进行
有一定宽度的声束,并对回波信号进行接收和记录。 近距离检测时才能达到这一效果。然而,SAFT 的
以厚度截面左上角表面某点处为原点建立 x-O-z 直 合成孔径的横向分辨率仅为探头孔径的一半 [16] ,而
角坐标系。当探头移动到(x 1 , 0)点时,位于(x, z)处 与波长和探测深度无关 [15,19] 。这就意味着可以采
的目标点进入声束的覆盖范围;当探头向右逐渐移 用单个小孔径探头和较低的工作频率实现对远距
动至 (x n , 0) 点时,目标点离开声束覆盖范围。因此, 离区域的高分辨率检测 [5,20] ,不仅能降低设备成本,
对于该目标点,有效的探头测点位置位于 x 轴上长 还能获得较高的成像质量。
度为L的[x 1 , x n ]坐标范围内,L 即为合成孔径的有
1.1.4 双探头衍射时差成像
效长度。由图 4 可见,该值等于声束在目标点深度 z
与 前 文 基 于 脉 冲 回 波 原 理 的 两 类 方 法 不
处的宽度。可以基于探头的半功率波束角 β 0.5 进行
同,超声波衍射时差法 (Time-of-flight diffraction,
估计 [15] :
TOFD) 基于一发一收原理,是一种通过获取缺陷
L ≈ β 0.5 · z. (2) 端点衍射波的传播时间差实现缺陷定位和定量的
由于探头是自发自收,因此对于第 i 个测点 (x i , 0), 检测方法。TOFD 被广泛应用在焊缝检测领域当
目标点(x, z)在该处接收信号中所对应的时刻为 中 [21] 。如图5所示,检测时,分别将两个相同的探头
放置在检测区域两侧。左端探头发射声束,右端探
√
2 2 /
t i (x, z) = 2 (x i − x) + z c, (3)
头接收回波信号。若该区域无缺陷,右端探头只会
式 (3) 中:c 为声波的传播速度,m·s −1 。对于有效长 收到沿结构上表面传播的侧向波和来自结构下表
度 L 范围内的 n 个测点,将各自接收信号中目标点 面的底面回波;若检测区域存在缺陷,右端探头的
(x, z)所对应时刻的幅值进行叠加,即可获得该点处 回波信号在侧向波和底面回波之间,还会存在来自
的像素值: 缺陷端点的衍射波。基于两个衍射波包的到达时刻