
Page 21 - 《应用声学》2025年第1期
P. 21
第 44 卷 第 1 期 张楠等: 检测声学成像原理与技术综述 17
和时间差,可以算出缺陷在两个探头连线方向上的 阵元所发波束的波阵面在互相干涉后将在特定的
位置并估计其尺寸 [14] 。在此基础上,TOFD存在两 角度上发生相长与相消,形成一个统一的波束 [1] 。
种扫查方式:一种方式是将探头沿着声束的传播方 由于对目标点探测的前提是该处必须处在声场的
向移动,称为平行扫查,所得结果是缺陷横断面的 覆盖范围内,因此波束形成是决定成像质量的关
B 扫描图像;另一种方式是将探头垂直声束的传播 键 [25] ,具体操作是对各阵元的激励信号施加一定的
方向移动,称为非平行扫查,所得结果是缺陷纵断 时延 [24] 。
面的 D 扫描图像 (见图 2)。两种扫描图像均为一系
ण ण
列回波信号平行排列组成。在图像质量较差的情况
下,可以考虑对所获信号采取包络检波和低通滤波 ᫎ ᫎ
等后处理方式,以使其成像轮廓更加清晰。TOFD
Ћ Ћ
的检测速度快、结果可靠,且能实现对缺陷尺寸的
准确估计。该方法的缺点是其检测范围在结构上下 ฉ᭧ ฉ᭧
表面附近存在了部分盲区,且检测图像不直观,使得 (a) Ϡᣁ (b) ᐑཥ
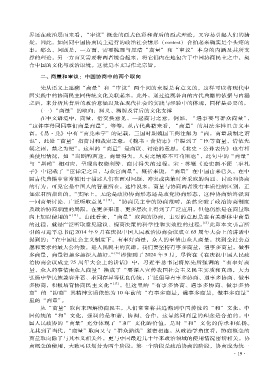
识别缺陷需要一定的经验 [22] 。 图 6 相控阵工作原理 [26]
Fig. 6 Principle of phased array [26]
T R
图 7 给出了相控阵在实现偏转、聚焦和同时偏
转聚焦过程中的阵列阵元时延计算方法。若根据阵
元之间的间距按照一定的时间差对阵元进行激励,
(a) ଊ݀࣋Ꮆவर 使得所形成的波阵面 (平面波) 不再与阵列沿线平
ᜈጯᮇቫ 行,而是偏转一定的角度,则能够实现声束的偏转。
ᛢ࠱ฉ
以中心阵元的激发时刻作为参照,第 i 个阵元的相
ΟՔฉ ᜈጯअቫ अ᭧ 对时延为
ᛢ࠱ฉ ڀฉ
(b) ଊ݀ᄊଌஆηՂ τ A = L i sin θ c /c, (5)
ΟՔฉ
式 (5) 中:L i 为第 i 个阵元到阵列中心阵元的距离,
m;θ c 为阵列中心的阵元所发出声束的偏转角度,
rad。类似地,若通过控制各阵元激发的时间差,使
ᜈጯᛢ࠱ฉ
得形成的波阵面为一弧面,并最终收缩到同一点处,
则能够实现声束在该点处的聚焦。以中心阵元的激
अ᭧ڀฉ 发时刻作为参照,第i个阵元的相对时延为
√
( )
(c) ੇϸፇ౧ 2 2 /
τ F = F − F + L i c, (6)
图 5 裂纹缺陷的 TOFD 检测 [14]
式 (6) 中:F 为焦距/m,即焦点到中心阵元的距离。
Fig. 5 TOFD detection of crack defects [14]
式(5)与式(6)所对应τ A 和τ F 即为偏转延迟和聚焦
1.2 相控阵成像
延迟。若要实现声束的同时偏转和聚焦,则各阵元
1.2.1 相控阵扫查原理
相对中心阵元的延迟时间应由两种延迟共同组成。
相比于单一阵元的超声探头,相控阵探头由多 此外,也可以根据目标点与阵列之间的距离直接进
个阵元组成,可以通过电子系统控制各阵元发射或 行计算。以中心阵元的激发时刻作为参照,第i个阵
接收超声波的时间 (相位) 实现声束在一定角度范 元的相对时延为
围内的偏转和聚焦 (如图 6 所示),具备更高的信噪
τ i = (r c − r i )/c, (7)
比和对缺陷更强大的评估能力 [5,23−24] 。常用相控
阵探头的阵元数量通常从 16 个到 256 个不等,可以 式(7) 中:r c 为阵列中心的阵元到目标点的距离,m;
应用于浸入式检测,也可以和楔块搭配使用 [3] 。各 r i 为第i个阵元到目标点的距离,m。