
Page 25 - 《应用声学》2025年第1期
P. 25
第 44 卷 第 1 期 张楠等: 检测声学成像原理与技术综述 21
法,还存在包括时间反转 (Time reversal) 法、时 U 0 (直接声场);进一步,计算散射信号 u m − u 0 并将
间迁移 (Time migration) 法和自适应时间延迟等 其在时域上反转后作为激励信号在健康结构中再
方法在内的自适应聚焦技术,能够有效应对不均 次进行发射,获取检测区域中的位移场 V 0 (伴随声
匀介质中的聚焦问题 [5] 。以下仅对涉及时间反转 场);最后,利用各点处的直接声场与伴随声场,基于
聚焦原理的拓扑成像 (Topological imaging) 技术 式(12)计算对应的拓扑能量 [54] ,
进行介绍 [54−55] 。该技术起源于结构设计中的形 ∫ T
2
2
G (x) = ∥U 0 (x, t)∥ ∥V 0 (x, t)∥ dt. (12)
状优化方法。代表方法包括时域拓扑梯度 (Time
0
domain topological gradient) 法和时域拓扑能量 以此作为该点处的像素值,并对各点的拓扑能量进
(Time-domain topological energy)法。 行计算,就能获得检测区域的图像。相比拓扑梯度
拓扑梯度法的思想是通过在健康结构中逐步 法,拓扑能量法的耗时更少,仅需借助一个简单的线
更新缺陷区域以使其逼近待测结构 (即拓扑渐进), 性阵列进行一次信号的发射和采集 [55] ;其成像结果
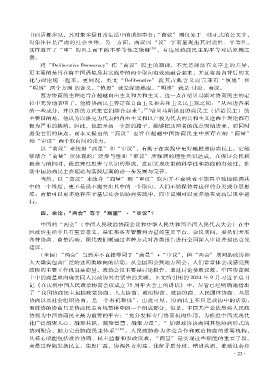
从而获取缺陷的图像 [56] 。设添加缺陷后的结构为 具有较高的分辨率。图 10 给出了采用时域拓扑能
Ω ε ,待测结构为 Ω m ,定义如下所示的成本函数以衡 量法检测带有 16 个侧边钻孔的复合材料板的成像
量二者声场之间的差异 [55] , 结果。
T
∫ ∫
1 2
j(Ω ε )= |u ε (x, t) − u m (x, t)| dxdt, (10)
2
0 Γ m
式(10) 中:u ε 和u m 分别为在缺陷结构 Ω ε 和待测结
构Ω m 的边界Γ m 处测量得到的回波信号,其波包有
效时间范围为 [0, T]。由此,问题转化为寻找使得成 ᨛߘͯᎶ
本函数最小化的结构 Ω。现将该函数关于健康结构
Ω 0 做渐进展开 [56] , B ೝᄬಖ
0
2
j (Ω ε ) = j (Ω 0 ) + f (ε) g (x) + o (f (ε)) , (11) 4
6
式 (11) 中:f(ε) 为恒为正值的缺陷表征函数。由于 10 8
缺陷结构 Ω ε 相当于健康结构 Ω 0 在x处增加了一个 ງए/mm 12
14
缺陷 ε,因此 f(ε) 会在缺陷 ε 极小时趋近于 0;g(x) 16
18
称为拓扑梯度 (Topological gradient)。鉴于 g(x) 为 0 10 20 30 40 50 60 70 80 90
ࠕए/mm
负会使得成本函数降低,这意味着只要找到了 g(x)
C ੇϸ౧
为负的地方并添加缺陷,就会使得缺陷结构更加接
图 10 拓扑能量法检测带有侧边钻孔的复合材料板 [55]
近待测结构。相应地,需要根据所添加的缺陷类型
Fig. 10 Detecting composites with side drilled
对应的边界条件,通过求解直接问题和基于时间反
holes using the topological energy method [55]
转的伴随问题获取各点处的 g(x) [54] 。进一步,以各
点处的梯度值作为该点的像素值,就能获得检测区 2 二维水平截面成像
域的图像。由于一次计算所获得的图像精度较低,
因此拓扑梯度法通常需要进行多次迭代才能获得 2.1 单探头或相控阵扫描成像(C扫)
较好的结果。 与厚度方向的扫描方法类似,C 型扫描 (Con-
在拓扑梯度法的基础上,拓扑能量法能够通过 stant depth scan, C-Scan)在A扫描基础上,可以通
直接求解直接声场和伴随声场实现对检测区域的 过布置在结构上表面的单探头或相控阵探头,获取
成像,从而避免了反复地迭代 [56] 。在检测时,首 被测结构在水平方向的图像,是一种常用的声学成
先针对待测结构,利用布置在边界 Γ m 上的线性阵 像技术。在检测时,应首先基于 A 扫信号获取缺陷
列发射激励信号并获取对应的响应信号 u m ;随后, 或目标深度处的回波时刻先验信息。随后,通过电
基于同样的流程,采用数值模拟方法获取健康结 动或人工的方式在结构表面移动超声探头,使其按
构中的阵列响应信号 u 0 以及检测区域中的位移场 照设定的步长沿着迂回的轨迹对表面进行有序扫