
Page 218 - 《应用声学》2025年第1期
P. 218
214 2025 年 1 月
10O 0O -10O 10O 0O -10O
70 20O -20O 80 20O -20O
30O -30O 30O -30O
60 70
40O -40O 50O 40O -40O
50
-50O
ܦԍጟ/dB 40 60O -60O ܦԍጟ/dB 60 60O -60O
-50O
50O
50
40
30
30
20
20
10 ฑҿ 10 ฑҿ
ѭඋᭃܻ ѭඋᭃܻ
0 0
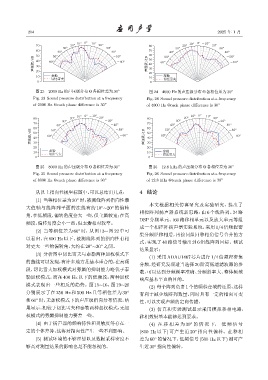
图 23 2000 Hz 的声压级分布 @ 各相位差为 30 ◦ 图 24 4000 Hz 的声压级分布 @ 各相位差为 30 ◦
Fig. 23 Sound pressure distribution at a frequency Fig. 24 Sound pressure distribution at a frequency
of 2000 Hz @each phase difference is 30 ◦ of 4000 Hz @each phase difference is 30 ◦
10O 0O -10O 10O 0O -10O
80 20O -20O 80 20O -20O
30O -30O 30O -30O
70 70
40O -40O 40O -40O
60 50O -50O 60 50O -50O
ܦԍጟ/dB 50 60O -60O ܦԍጟ/dB 50 60O -60O
40
40
30
20
20 30
ฑҿ ฑҿ
10 10
ѭඋᭃܻ ѭඋᭃܻ
0 0
图 25 8000 Hz 的声压级分布 @ 各相位差为 30 ◦ 图 26 12.8 kHz 的声压级分布 @ 各相位差为 30 ◦
Fig. 25 Sound pressure distribution at a frequency Fig. 26 Sound pressure distribution at a frequency
of 8000 Hz @each phase difference is 30 ◦ of 12.8 kHz @teach phase difference is 30 ◦
从以上指向性极坐标图中,可以总结出几点: 4 结论
(1) 当等相位差为30 时,被测线阵列指向性最
◦
本文根据相关仿真研究及实验研究,提出了
大值轴与线阵列平面的法线有约 10 ∼20 的偏转
◦
◦
相控阵列扬声器系统新思路:由 6 个线阵列、24 路
角,在低频段,偏转角度会大一些,但主瓣较宽;在高
DSP 分频单元、160 路移相单元以及放大单元等组
频段,偏转角度会小一些,但主瓣相对较窄。
成一个相控阵扬声器实验系统,采用 1/4 倍频程密
(2) 当等相位差为 60 时,从图 13∼ 图 22 中可
◦
集分频经移相后,再按同组同移相角信号合并的方
以看出,在 800 Hz 以下,被测线阵列的指向性有相
式,实现了 40 路信号输出到 6 组线阵列目标。测试
对更大一些的偏转角,大约在20 ∼30 之间。
◦
◦
结果显示:
(3) 分析图中切比雪夫与泰勒两种加权模式下
(1) 采用 ADAU1467 芯片进行 1/4 倍频程密集
的曲线可以发现,有许多地方是基本重合的,在高频
分频,经研究发现适当选择20阶高低通滤波器的参
段,切比雪夫加权模式对旁瓣的抑制能力略优于泰
数,可以达到分频频率准确、分频斜率大、整体频域
勒加权模式,而在 400 Hz 以下的低频段,两种加权
响应基本平直的目的。
模式表现出一些相反的趋势。图 15∼16、图 19∼20
(2) 每个阵列负责1个倍频程音域的还原,这样
分别展示了在 250 Hz 和 500 Hz 且等相位差为 30 ◦ 有利于减少线阵列数量,同时具有一定的指向可变
和60 时,无加权模式下的声压级指向分布情况,结 性,可以实现声频的定向传播。
◦
果显示,相较于切比雪夫和泰勒两种加权模式,无加 (3) 仿真和实验测试显示采用模拟移相电路,
权模式的旁瓣抑制能力要差一些。 移相效果基本能够达到要求。
(4) 由于扬声器的频响特性和灵敏度等存在一 (4) 在 移 相 差 为 30 的 情 况 下, 低 频 信 号
◦
定的个体差异,这将对指向性产生一些不利影响。 (800 Hz 以下) 可产生近 20 指向性偏转。在移相
◦
(5) 测试环境的不够理想以及数据采样密度不 差为 60 的情况下,低频信号 (500 Hz 以下) 则可产
◦
够高对测量结果的影响也是不能忽视的。 生近30 指向性偏转。
◦