
Page 74 - 《应用声学》2025年第2期
P. 74
334 2025 年 3 月
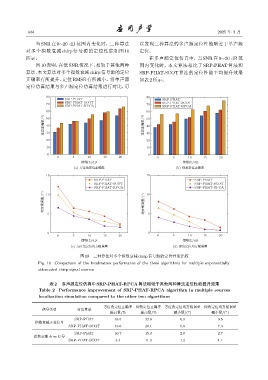
当 SNR 在 0∼20 dB 范围内变化时,三种算法 以发现三种算法的多声源定位性能略差于单声源
对多个指数衰减 chirp 信号源的定位性能如图 10 定位。
所示。 在多声源定位仿真中,当 SNR 在 0∼20 dB 范
图10 表明,在低 SNR 情况下,相较于其他两种 围内变化时,本文算法相比于 SRP-PHAT 算法和
算法,本文算法对多个指数衰减chirp信号源的定位 SRP-PHAT-SCOT 算法的定位性能平均提升效果
正确率有所提升,定位 RMSE 有所减小。将单声源 如表2所示。
定位仿真结果与多声源定位仿真结果进行对比,可
80 80
SRP-PHAT SRP-PHAT
SRP-PHAT-SCOT SRP-PHAT-SCOT
70 70
SRP-PHAT-RPCA SRP-PHAT-RPCA
60 60
ࠀͯᆸဋ/% 50 ࠀͯᆸဋ/% 50
40
40
30
20 30
20
10 10
0 0
0 5 10 15 20 0 5 10 15 20
η٪උ/dB η٪උ/dB
(a) வͯᝈࠀͯᆸဋ (b) ̈́ᝈࠀͯᆸဋ
15 15
SRP-PHAT SRP-PHAT
SRP-PHAT-SCOT SRP-PHAT-SCOT
SRP-PHAT-RPCA 10 SRP-PHAT-RPCA
کவಪឨࣀ/(O) کவಪឨࣀ/(O)
10
5 5
0 0
0 5 10 15 20 0 5 10 15 20
η٪උ/dB η٪උ/dB
(c) வͯᝈࠀͯکவಪឨࣀ (d) ̈́ᝈࠀͯکவಪឨࣀ
图 10 三种算法对多个指数衰减 chirp 信号源的定位性能比较
Fig. 10 Comparison of the localization performance of the three algorithms for multiple exponentially
attenuated chirp signal sources
表 2 多声源定位仿真中 SRP-PHAT-RPCA 算法相较于其他两种算法定位性能提升效果
Table 2 Performance improvement of SRP-PHAT-RPCA algorithm in multiple sources
localization simulation compared to the other two algorithms
方位角定位正确率 仰角定位正确率 方位角定位均方根误差 仰角定位均方根误差
信号类型 对比算法
提高量/% 提高量/% 减小量/( ) 减小量/( )
◦
◦
SRP-PHAT 16.5 32.8 6.9 9.5
指数衰减正弦信号
SRP-PHAT-SCOT 13.6 28.1 5.8 7.3
SRP-PHAT 10.7 15.3 2.6 2.7
指数衰减 chirp 信号
SRP-PHAT-SCOT 3.4 11.2 1.2 1.1