
Page 147 - 201805
P. 147
第 37 卷 第 5 期 陈文剑等: 起伏海面环境下水声信道特性及估计方法 729
1.0 1.2
1.0
0.8
ࣨϙ/10 -3 0.6 ࣨϙ/10 -4 0.8
0.6
0.4
0.4
0.2
0.2
0 0
0.5 1 1.5 2 2.5 3 3.5 5 10 15 20 25 30 35
ᫎ/s ᫎ/s
(a) ᤰηᡰሏ˞1 km (b) ᤰηᡰሏ˞10 km
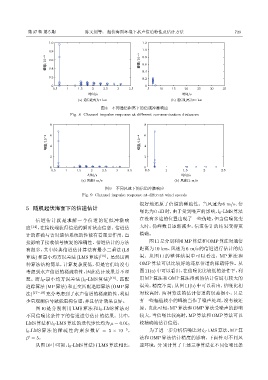
图 8 不同通信距离下的信道冲激响应
Fig. 8 Channel impulse response at different communication distances
8 8
ࣨϙ/10 -4 6 4 ࣨϙ/10 -4 6 4
2 2
0 0
0.5 1 1.5 2 2.5 3 3.5 0.5 1 1.5 2 2.5
ᫎ/s ᫎ/s
(a) ᮳ᤴ9 m/s (b) ᮳ᤴ12 m/s
图 9 不同风速下的信道冲激响应
Fig. 9 Channel impulse response at different wind speeds
很好地还原了信道的稀疏性。当风速为 6 m/s、信
5 随机起伏海面下的信道估计
噪比为 0 dB 时,由于受到噪声的影响,l 0 -LMS 算法
信道估计就是求解一个信道的近似冲激响 在没有多途的位置出现了一些伪峰,但当信噪比变
应 [14] ,在接收端获得信道的瞬时状态信息。信道估 大时,伪峰数目逐渐减少,信道估计的结果变得更
计的准确与否对通信系统的性能有着重要作用,直 精确。
接影响了接收信号恢复的准确性。信道估计的方法 图11是分别利用MP算法和OMP算法对通信
有很多,其中经典信道估计算法有最小二乘法 (LS 距离为 10 km、风速为 6 m/s 的信道进行估计的结
算法) 和最小均方误差法 (LMS算法) [15] 。虽然这两 果。从图 11 的整体结果中可以看出,MP 算法和
种算法结构简单,计算复杂度低,但是它们均没有 OMP 算法可以比较好地还原信道的稀疏特性。从
考虑到水声信道的稀疏特性,因此估计效果并不理 图 11(a) 中可以看出,在信噪比比较低的条件下,利
想。而 l 0 -最小均方误差法 (l 0 -LMS 算法) [16] 、匹配 用 MP 算法和 OMP 算法得到的估计信道有较大的
追踪算法 (MP算法)和正交匹配追踪算法(OMP算 误差,精度不高;从图 11(b) 中可以看出,信噪比相
法) [17−18] 充分考虑到了水声信道的稀疏特性,利用 对较高时,两种算法的估计信道的误差很小,只是
少量观测信号就能重构信道,并且估计效果良好。 有一些幅值较小的峰被当作了噪声处理,没有被还
图 10 是分别利用 LMS 算法和 l 0 -LMS 算法对 原。由此可知,MP 算法和 OMP 算法受噪声的影响
不同信噪比条件下的信道进行估计的结果。其中, 较大,当信噪比较高时,MP 算法和 OMP 算法可以
LMS算法和 l 0 -LMS 算法的迭代步长均为µ = 0.01; 较精确地估计信道。
l 0 -LMS 算法的稀疏性约束参数 k = 5 × 10 −5 , 为了进一步分析信噪比对 l 0 -LMS 算法、MP 算
′
β = 5。 法和 OMP 算法估计精度的影响,下面针对不同风
′
从图 10中可知,l 0 -LMS算法同 LMS算法相比, 速环境,分 别计算了上述三种算法在不同信噪比条