
Page 232 - 201805
P. 232
814 2018 年 9 月
15 mm
60 mm
5 mm×2
80 mm 120 mm 60 mm
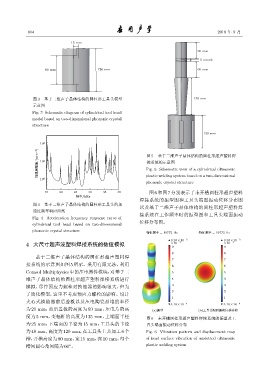
图 3 基于二维声子晶体结构的圆柱形工具头模型 135 mm
示意图
Fig. 3 Schematic diagram of cylindrical tool head
model based on two-dimensional phononic crystal
structure
120 mm
10 2
ҫᤴएࣨϙ/(mSs -2 ) 10 1 Fig. 5 Schematic view of a cylindrical ultrasonic
图 5
基于二维声子晶体结构的圆柱形超声塑料焊
接系统的示意图
10 0 plastic welding system based on a two-dimensional
phononic crystal structure
15 20 25 30 35 40 图 6 和图 7 分别表示了未开槽圆柱形超声塑料
ᮠဋ/kHz
焊接系统的振型图和工具头端面振动位移分布图
图 4 基于二维声子晶体结构的圆柱形工具头的加
以及基于二维声子晶体结构的圆柱形超声塑料焊
速度频率响应曲线
接系统在工作频率时的振型图和工具头端面振动
Fig. 4 Acceleration frequency response curve of
位移分布图。
cylindrical tool head based on two-dimensional
phononic crystal structure
ྲढ़ᮠဋ=19772 Hz ྲढ़ᮠဋ=19772 Hz
9.28T10 -3 9.28T10 -3
4 大尺寸超声波塑料焊接系统的数值模拟 T10 -3 T10 -3
9 9
8 8
基于二维声子晶体结构的圆柱形超声塑料焊
7 7
接系统的示意图如图 5 所示。采用有限元法,利用 6 6
Comsol Multiphysics中的压电器件模块,对基于二 5 5
维声子晶体结构的圆柱形超声塑料焊接系统进行 4 4
模拟,尽管预应力螺栓对换能器的影响很大,但为 3 3
2 2
了简化模型,这里不考虑预应力螺栓的影响。设计
1 1
夹心式换能器前后盖板以及压电陶瓷晶堆的半径
3.18T10 -4 3.18T10 -4
为 20 mm,前后盖板的高度为 60 mm,压电片的高 (a)ی (b)ࢺЦ݀ቫ᭧үͯረѬ࣋
度为 5 mm,变幅杆的高度为 135 mm,上端面半径 图 6 未开槽圆柱形超声塑料焊接系统的振型及工
为 25 mm,下端面的半径为 15 mm,工具头的半径 具头端面振动位移分布
为48 mm,高度为 120 mm,在工具头上共加工 6 个 Fig. 6 Vibration pattern and displacement map
槽,开槽高度为 80 mm,宽 15 mm,深 10 mm,每个 of head surface vibration of unslotted ultrasonic
槽间圆心角间隔为60 。 plastic welding system
◦