
Page 239 - 201805
P. 239
第 37 卷 第 5 期 史慧宇等: 焊缝结构中超声相控阵聚焦声场的数值模拟及分析 821
T10 4
2.5 T10 4
2.5 x: 0.03
y: -0.0168
2.0 2.0 z: 1.963e+04
1.5
1.5
1.0
x: 0.02396
1.0 0.5
y: -0.00462
z: 4356
0
0.5 0
0.04
-0.01 0.02
0 0
֓⊲ ⊲ ֓⊲ y/m -0.02 -0.02 x/m
x/m ⊲ y/m
(a) 5 mmງएܫᄊᐑཥܦڤ (b) ཝᎋతअᦊᄊᐑཥܦڤ
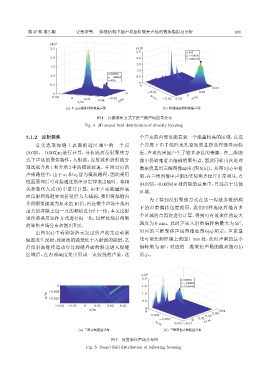
图 4 直接聚焦方式下的三维声场能量分布
Fig. 4 3D sound field distribution of directly focusing
3.1.2 反射聚焦 个声束的内部也能看到一个能量较高的区域,在这
首先选取焊缝上表面附近区域中的一个点 个厚度下由于线阵元孔径较宽且距离焊缝界面较
(0.025,−0.003)m 进行计算,分析底面反射聚焦方 近,声束的周围产生了较多杂乱的旁瓣。在二维图
式下声场的聚焦特性,入射波、反射波和折射波分 像中仍较难看出准确的聚焦点,因此同样再次处理
别选取介质 1 和介质 2 中的横波波速。在图 2(b) 的 数据将其用三维图像画出(图5(b))。从图 5(b)中看
声束路径中,由于 s 1 和 s 2 皆为横波路程,因此采用 到,在三维图像中声束的实际焦点位置非常明显,点
镜面原理后可直接通过斯涅尔定律求出延时。将相
(0.0255,-0.0028)m 处的能量最集中,且远高于其他
关参数代入式 (8) 中进行计算,由于声束能量经底
区域。
面反射和焊缝界面折射后大大减弱,我们将焊缝内
为了得到反射聚焦方式在这一焊缝参数结构
介质幅值提高为原来的 10倍,再在整个声场中找出
下的声束偏转角度范围,我们同样选取焊缝内多
最大值并除上每一点的幅值进行归一化,本文反射
个区域的点再次进行计算,得到可有效聚焦的最大
聚焦都采用这种方式进行归一化,这样处理后得到
深度为 8 mm,此时声束入射的偏转角最大为 55 ,
◦
的聚焦声场分布如图5所示。
由图 5(a) 中看到各阵元发出的声波先运动到 对应的三维聚焦声场图像如图 6(a) 所示;声束最
底面发生反射,反射波的能量低于入射波的能量,之 浅可聚焦到焊缝上表面 1 mm 处,此时声束的最小
后反射波继续运动穿过焊缝界面的斜边进入焊缝 偏转角为 40 ,对应的三维聚焦声场图像如图 6(b)
◦
区域后,在内部高度集中形成一束较强的声束,这 所示。
T10 5
2.0
x: 0.02554
y: -0.00282
1.5 z: 8.723e+04
֓⊲ 1.0
y/m ֓⊲
0.5
֓⊲ ֓⊲ ⊲ ⊲ ⊲
x/m 0 0.04
0 0.03
-0.005 0.02
-0.010 0 0.01 x/m
-0.015 -0.01
y/m
(a) ̄፥ܦڤᑟ᧚Ѭ࣋ (b) ʼ፥ᅌᓤܦڤᑟ᧚Ѭ࣋
图 5 反射聚焦声场分布图
Fig. 5 Sound field distribution of reflecting focusing