
Page 78 - 201805
P. 78
660 2018 年 9 月
භˤࡏ
ԍႃᬝၬ
үູ Ӝᦡࡏ -0.5 0.5 0 mN
ᑿ᥋
ω 16 mm
S r -2.90 0 2.90
r X֒ λ
©
dr O 0.15
ᢾ᥋
500 µm 0 mN
ᢾ᥋
ႃౝ ႃౝ -0.15
-2.90 0 2.90
Z֒ λ
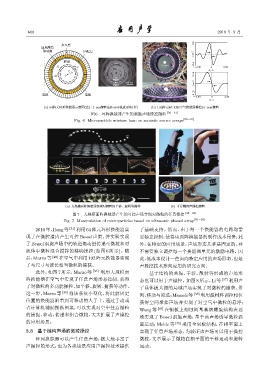
(a) 64Ћဗॎ૱ᑟ٨ᇨਓڏ(ࢻ): 1 mmॲዢښBesselᢾ᥋ᤂү(Կ) (b) 192Ћ40 kHzቇඡ૱ᑟ٨୲16 mmॲዢ
图 6 环阵换能器产生的涡旋声场操控微粒 [20−21]
Fig. 6 Microparticle mixture base on acoustic source arrays [20−21]
(a) ܸവ᭧૱ᑟ٨ࠄဘࠫॲዢᄊࣱረnjᣁ୲ͻ (b) Իቈਖ਼ᄊܦ୲ॲዢ
图 7 大规模面阵换能器产生的可控声场实现对微粒的任意操控 [35−36]
Fig. 7 Manipulation of microparticles based on ultrasonic phased array [35−36]
2016年,Hong等 [21] 利用64阵元环形换能器实 了基础支持。然而,由于每一个换能器的电路均需
现了在微腔道内产生可控 Bessel 声束,并实验实现 要独立控制,使得该面阵换能器的制作成本昂贵;此
了Bessel涡旋声场中的轨道角动量传递至微粒和对 外,在特定的应用场景,声场形态几乎是固定的,并
流体中微粒混合搅拌的精确操控 (如图 6 所示)。随 不需要独立调控每一个换能器单元的激励电路。因
后,Marzo 等 [20] 在空气中利用 192阵元换能器实现 此,低成本设计一些面向特定应用的声场形态,也是
了与尺寸与波长相当微粒的捕获。 声操控技术推向应用的研究方向。
此外,如图 7 所示,Marzo 等 [35] 利用大规模面 基于结构的共振、干涉、散射等形成的声场形
阵换能器在空气中实现了任意声场形态控制,获得 态也可以用于声操控。如图 8 所示,Li 等 [37] 利用声
了对微粒的多功能操控,如平移、旋转、捕获等动作。 子晶体板共振的局域声场实现了对微粒的捕获、排
进一步,Marzo 等 [36] 将该系统小型化,将此前固定 列、移动与筛选;Memoli等 [38] 利用超材料调控相位
位置的换能器附着到可移动的人手上,通过手动或 获得空间聚焦声场并实现了对空气中微粒的悬浮;
者计算机辅助操纵图案,可以实现对空中任意微粒 Wang 等 [39] 在铜板上刻蚀阿基米德螺旋结构在远
的捕捉、移动、传递和组合微粒,大大扩展了声操控
场实现了 Bessel 涡旋声场,基于该声场诱导微粒涡
的应用场景。
旋运动;Melde 等 [40] 采用全息板结构,在相平面上
3.3 基于结构声场的微粒操控 实现了任意声场形态,为验证该声场可以用于操控
阵列换能器可以产生任意声场,极大地丰富了 微粒,文章展示了微粒在相平面的平移运动和旋转
声操控的形式,也为各类场景应用声操控技术提供 运动。