
Page 9 - 201806
P. 9
第 37 卷 第 6 期 刘建全等: 钢轨缺陷的超声相控阵波数成像算法 839
纵波速 6900 m/s。实验中相控阵的具体参数如表 1 区域缺陷目标的鉴定。采用波数成像算法快速重建
所示。为了验证上述理论分析的正确性,必须考虑 图像,图 5(a)、图 5(b) 的成像结果分别和 B 型相控
实验数据结果的影响因素。本文对实验采集的全 阵试块、钢轨中的缺陷完全吻合,证实了波数算法
矩阵进行了预处理,其中包括去除耦合剂的影响, 的有效性。由于只采用自发自收模式下的数据,聚
处理了实验数据漂移影响,去除探头和被测物体之 焦效果不是很明显,只能够反映缺陷的位置而不能
间干扰信号以及物体表层表面波和直达波混合干 够准确地反映缺陷的形状,从成像结果看出图像的
扰。此外,对全矩阵数据进行了带通滤波处理,保 分辨率不高,图像的信噪比也不高。
留了探头中心频率为 2.5 MHz 的主要信息,进一步
表 1 超声相控阵参数配置
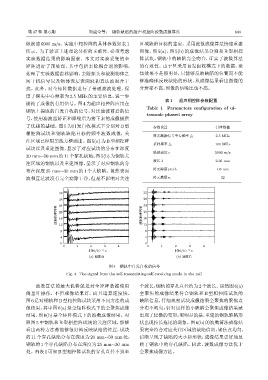
提纯了成像的有用信号。图4 为超声相控阵应用在
Table 1 Parameters configuration of ul-
钢轨上提取的自发自收的信号,对比滤波前后的信
trasonic phased array
号,使用滤波器矫正和降噪后为接下来的成像提供
了优越的基础。图5 为自发自收模式下分别对 B 型 参数设置 具体数值
相控阵试块和钢轨缺陷目标的频率波数成像,关
阵元激励信号中心频率 f 0 2.5 MHz
注区域已经用黑线方框画出。图5(a)为B型相控阵
采样频率 f s 100 MHz
试块以及重建图像,显示了对应试块的分布在深度
纵波速度 c 5900 m/s
20 mm∼50 mm 的11个穿孔缺陷;图5(b) 为钢轨关
波长 λ 2.36 mm
注区域的钢轨以及重建图像,显示了对应钢轨的分
布在深度 25 mm∼30 mm 的 1 个大缺陷。虽然表面 阵元跨度 pitch 1.0 mm
波和直达波没有完全滤除干净,但是不影响对关注 阵元数量 n 32
32 32
28 28
24 24
ฉॎᄊऀѵՂ 20 ฉॎᄊऀѵՂ 20
16
16
12
8
8 12
4 4
0 0
0 1 2 3 4 0 1 2 3 4
ᫎ/10 -5 s ᫎ/10 -5 s
(a) ฉҒ (b) ฉՑ
图 4 钢轨中自发自收的信号
Fig. 4 The signal from the self-transmitting-self-receiving mode in the rail
波数算法的最大优势就是对全矩阵数据使用 个波长,钢轨的穿孔直径约为2个波长。虽然图6(a)
傅里叶操作,不但成像结果好,而且运算速度快。 全聚焦的成像结果符合钢轨和 B 型相控阵试块的
图6是对钢轨和 B型相控阵试块采用不同方法的成 缺陷信息,仔细观察试块成像结果全聚焦的聚焦点
像结果,其中图 6(a) 是全矩阵模式下的全聚焦成像 分布不均匀,针对这样的小缺陷全聚焦成像结果就
结果,图 6(b) 是全矩阵模式下的波数成像结果。对 出现了轻微的变形,更明显的是,重建的钢轨缺陷形
照图 5 中钢轨和 B 型相控阵试块的关注区域,能够 状出现拉长拖尾的现象。图6(b)的波数算法成像结
看出两种方法都能够很好地反映缺陷的位置,试块 果完全符合对应关注区域的缺陷信息,聚焦点均匀,
的 11 个穿孔缺陷分布在深度为 20 mm∼50 mm 处, 清晰呈现了缺陷的大小和形状,成像结果更好地反
钢轨的 1 个穿孔缺陷分布在深度为 25 mm∼30 mm 映了钢轨中的穿孔缺陷。因此,波数成像方法优于
处。由表 1 可知 B 型相控阵试块的穿孔直径不到半 全聚焦成像方法。