
Page 51 - 应用声学2019年第2期
P. 51
第 38 卷 第 2 期 蒋剑等: 基于聚焦换能器的超声透射 CT 技术 197
因此式 (4) 属于大型稀疏病态方程组。对此,可通 建图像中点 (x, y) 的灰度值,M 和 N 分别表示灰度
过双对角化来求解式 (4),以下给出基本公式,具体 图像的长度和宽度,L 为数字图像的灰度级数,则
的求解方式参见文献 [19]。若U k = [u 1 , · · · , u k ] 和 MSE表示为
V k = [v 1 , · · · , v k ] 为正交阵,且B k 为(k + 1) × k 的 ∑ ∑ 2
N
M
′
下双角阵 [f (x, y) − f(x, y)]
x=1 y=1
MSE = . (9)
α 1 · · · · · · · · · M × N
PSNR表示为
β 2 α 1 · · · · · · · · ·
B k = , (5) 2
(L − 1)
PSNR = 10 lg (10)
· · · · · · · · · α k .
MSE
· · · · · · · · · β k+1
为了对比 FBP算法和 LSQR算法的优缺点,依
运用迭代法实现矩阵A的双对角分解 据式 (9) 和式 (10),取 L 为 256,分别计算使用两种
T 算法重建图像的 MSE与PSNR,同时计算出两种算
β 1 u 1 = b, α 1 v 1 = A u 1
法的程序运行耗时,结果如表3所示。
i = 1, 2, · · · , k, (6)
β i+1 = Av i − α i u i
T
α i+1 v i+1 = A β i+1 v i 表 3 算法对比
其中,α i > 0, β i > 0。令 ∥u i ∥ ≡ ∥v i ∥ ≡ 1,式 (6) Table 3 Comparison of algorithms
可写为
重建算法 MSE PSNR/dB 耗时/s
U k+1 (β 1 e 1 ) = b,
FBP 18.49 14.26 4.89
AV k = U k+1 B k , (7)
LSQR 7.85 56.14 65.19
T T T
A U k+1 = V k B + α k+1 v k+1 e ,
k k+1
其中,e T 表示 n 阶单位矩阵的第 k + 1 行,设 由表3可以看出,与FBP算法相比,LSQR算法
k+1
x k = V k y k , r k = b − Ax k , t k+1 = β 1 e 1 − B k y k , 虽然运算时间较久,但能够重建出较高质量的图像。
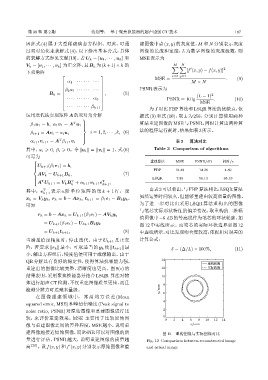
可知 为了进一步对比出采用 LSQR 算法重构出的图像
与笔芯实际形状特征的偏差情况,取重构的二维幅
r k = b − Ax k = U k+1 (β 1 e 1 ) − AV k y k
值图像中 −6 dB 的等高线作为笔芯的环状轮廓,如
= U k+1 (β 1 e 1 ) − U k+1 B k y k
图 12 中实线所示。而笔芯的实际环状边界如图 12
= U k+1 t k+1 , (8) 中虚线所示,对比发现吻合度较高,依据相对误差的
当满足给定精度时,停止迭代。由于 U k+1 是正交 计算公式:
阵,若要求 ∥r k ∥ 最小,可取适当的 y k 使 ∥t k+1 ∥ 最 δ = (∆/L) × 100%, (11)
小,解出方程组后,慢度值便可用于成像输出。由于
QR 分解具有良好的稳定性,使得算法抗噪能力强, 14
᧘ᣃझ
重建出的图像比较完整,清晰度也更高。图 9(c) 的 12 ࠄᬅᣃझ
结果表明,采用聚焦换能器并结合 LSQR 算法对物 10
体进行超声 CT检测,不仅重建图像质量更佳,而且 8
检测分辨力可达毫米量级。 y⊳mm 6
在图像重建领域中, 常用均方误差 (Mean
4
squared error, MSE) 和峰值信噪比 (Peak signal to
noise ratio, PSNR) 对原始图像和重建图像进行比 2
较,来评价重建效果。MSE 主要用于比较原始图 0 0 2 4 6 8 10 12 14
像与重建图像之间的差异程度,MSE 越小,说明重 x⊳mm
建图像越接近原始图像,而 PSNR 可以对图像的质 图 12 重构图像与实际图像对比
量进行评估,PSNR 越大,说明重建图像的质量越 Fig. 12 Comparison between reconstructed image
高 [20] 。设f(x, y)和f (x, y)分别表示原始图像和重 and actual image
′