
Page 241 - 应用声学2019年第4期
P. 241
第 38 卷 第 4 期 王梁等: 基于超椭圆拟合的水下小目标分类 701
通过分析图 4,可以看出在提取目标阴影边界 是,目标阴影边界提取的好坏直接影响边界坐标集
之前,需要预处理图像。首先,利用无监督马尔科 的准确度,此坐标集为超椭圆曲线的拟合提供了重
夫分割算法 [13] 将图像分割若干个区域,得到感兴 要的数据基础,因此,阴影边界的提取成为目标识别
趣的目标阴影区域。然后,使用中值滤波、形态学 过程中最重要的一步。
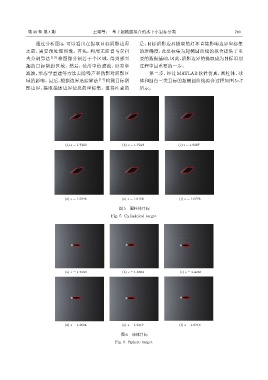
滤波、形态学重建等方法去除噪声和伪影对阴影区 第二步,经过 MATLAB 软件仿真,圆柱体、球
域的影响。最后,根据边界追踪算法 [14] 检测目标阴 体和圆台三类目标的超椭圆曲线拟合过程如图5∼7
影边界,提取描述边界信息的坐标集。值得注意的 所示。
(a) ε=1.7460 (b) ε=1.7218 (c) ε=1.6907
(d) ε=1.5948 (e) ε=1.6158 (f) ε=1.6776
图 5 圆柱体目标
Fig. 5 Cylindrical target
(a) ε=1.7100 (b) ε=1.6863 (c) ε=1.4283
(d) ε=1.3604 (e) ε=1.2317 (f) ε=1.0716
图 6 球体目标
Fig. 6 Sphere target