
Page 255 - 应用声学2019年第4期
P. 255
第 38 卷 第 4 期 盛斯雨等: 快速正交搜索算法在水声信号处理中的应用 715
0 时间长度仍为 3 s。为了便于观测信号在时频两个
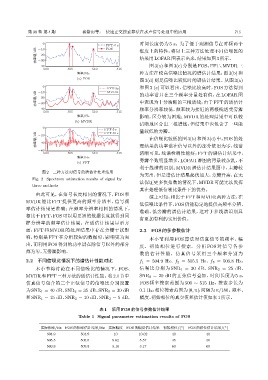
FFT-3 s
Ҫဋ៨/dB -20 维度上的特性,将以上三种方法处理不同信噪比的
FOS
-10
结果用LOFAR图表示出来,结果如图3所示。
-30
-40 图 3(a) 和图 3(c) 分别是 FOS、FFT、MVDR 三
500 505 510 515
ᮠဋ/Hz 种方法在较高信噪比情况的谱估计结果,图3(b) 和
(a) FOS
图3(d)则是信噪比较低时的谱估计结果。从图3(a)
0 和图 3 (c) 可以看出,信噪比较高时,FOS 方法得到
FFT-3s
-10
Ҫဋ៨/dB -20 的功率谱只在三个频率分量处有值,在 LOFAR 图
MVDR
中表现为十分清晰的三根谱线;由于FFT的谱估计
-30
-40 频率分辨率较低,频率较为接近的两根线谱受旁瓣
500 505 510 515
ᮠဋ/Hz 影响,区分较为困难;MVDR 的处理结果中可以较
(b) MVDR
清晰地区分出三根谱线,但结果中也包含了一些能
0
FFT-3 s 量较低的旁瓣。
FFT-10 s
Ҫဋ៨/dB -20 在信噪比较低的图3(b)和图3(d)中,FOS的处
-40
-60 理结果的功率谱在信号以外的部分依旧为零,线谱
500 505 510 515 清晰可见,线谱检测性能好;FFT 的谱估计结果中,
ᮠဋ/Hz
旁瓣个数明显增多,LOFAR谱图的背景较杂乱,不
(c) FFT
利于线谱的识别;MVDR 谱估计结果图中,主瓣较
图 2 三种方法对信号的谱估计处理结果
为突出,但是谱估计结果起伏加大,旁瓣升高,在无
Fig. 2 Spectrum estimation results of signal by
法保证更多快拍数的情况下,MVDR 可能无法发挥
three methods
其在处理低信噪比条件下的优势。
由此可见,在信号长度相同的情况下,FOS 和
综上可知,相比于 FFT和MVDR 两种方法,在
MVDR 能比 FFT 提供更高的频率分辨率,信号频
低信噪比条件下,FOS仍能稳定地提供高频率分辨、
率估计结果更准确;在频率分辨率相同的情况下,
准确、低旁瓣的谱估计结果,这对于多线谱识别具
相比于 FFT,FOS可以用更短的数据长度就得到同
有更加有利的实用价值。
样分辨率的频率估计结果。在谱估计结果显示方
面,FFT 和 MVDR 的处理结果中存在旁瓣干扰影 2.3 FOS的多参数估计
响,特别是 FFT 在分析较短的数据时,影响更为突 本小节利用 FOS 算法对仿真信号的频率、幅
出,而利用 FOS得到的功率谱在除信号以外的部分 度、初始相位进行搜索,分析 FOS 对信号各参
都为零,无旁瓣影响。 数的估计性能。仿真信号采用三个频率分别为
2.2 不同信噪比情况下的谱估计性能对比 f 1 = 504.9 Hz、f 2 = 505.5 Hz、f 3 = 509.8 Hz,
本小节将讨论在不同信噪比的情况下,FOS、 信噪比分别为 SNR 1 = 30 dB、SNR 2 = 25 dB、
MVDR和FFT三种方法的谱估计性能。将2.1节中 SNR 3 = 20 dB 的正弦信号叠加,时间长度为 5 s,
仿真信号包含的三个正弦信号的信噪比分别设置 FOS 频率搜索范围为 500 ∼ 515 Hz,搜索步长为
为 SNR 1 = 40 dB、SNR 2 = 35 dB、SNR 3 = 30 dB 0.1 Hz,相位搜索范围为[0, π],间隔为π/180。频率、
和 SNR 1 = 15 dB、SNR 2 = 10 dB、SNR 3 = 5 dB, 幅度、初始相位的真实值和估计值如表1所示。
表 1 采用 FOS 的信号参数估计结果
Table 1 Signal parameter estimation results of FOS
实际频率/Hz FOS 的频率估计结果/Hz 实际幅度 FOS 的幅度估计结果 初始相位/( ) FOS 的相位估计结果/( )
◦
◦
504.9 504.9 10 10.02 40 40
505.5 505.5 5.62 5.57 35 36
509.8 509.8 3.16 3.17 60 60