
Page 250 - 应用声学2019年第4期
P. 250
710 2019 年 7 月
距离;当声呐发射的波束未触及水底时,h i,j 为声呐 数、总目标个数进行统计,统计结果如表 2 所示。其
的探测范围。 中 “目标个数” 是指通过目标提取算法将每帧图像
在已知 S 的前提下,通过公式 (29)∼(32) 即可 中的目标个数累加的结果,“总目标个数” 是指利用
获得鱼群总数的估计值。 目标跟踪算法统计的有效目标个数。
z 表 1 各航段数据记录
t t Table 1 Data records of each route
y 航段编号 航段长度/m 探测面积/m 2 目标数量
γ
x
β 1 3109 892 297
2 4561 1349 518
3 1871 8156 626
h i
4 3740 19401 1686
5 3828 17186 1869
6 3907 1101 759
S i
7 4605 1400 1031
L i 8 6703 30406 879
图 6 声呐扫描的水域面积 9 1827 4940 474
Fig. 6 Water area detected by the sonar 10 962 4535 324
11 7312 31693 1427
3 试验及分析 12 3901 17475 1346
表 2 人工计数与自动计数统计
3.1 数据采集与记录
Table 2 Statistics through manual and au-
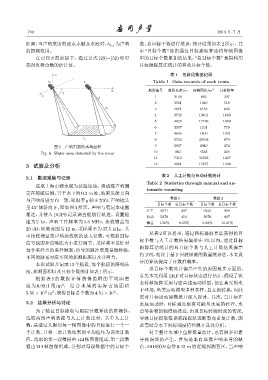
选取上海市滴水湖为试验场地。将成像声呐固
tomatic counting
定在船舷后侧,置于水下约 0.3 m 处,波束发射方向
与声呐前进方向一致,即沿着y 轴正方向,声呐镜头 数据 1 数据 2
目标个数 总目标个数 目标个数 总目标个数
呈45°倾斜向下,即如图 5 所示。声呐与笔记本电脑
人工 5971 497 6226 999
相连,并接入 DGPS 记录调查船航行轨迹。设置船
自动 5878 454 5978 897
速为 2 kn,声呐工作频率为 1.8 MHz,接收增益为 偏差 1.56% 8.65% 3.98% 10.21%
20 dB,探测范围为 12 m,采样频率为 37.5 kHz。其
从表 2 可以看出,通过目标提取算法获得的目
中接收增益指声呐接收机的放大倍数,可根据目标
标个数与人工计数结果偏差在 4% 以内,通过目标
信号强弱和信噪比大小进行调节。采样频率是针对
跟踪算法统计的总目标个数与人工计数结果偏差
每个采样点的采样频率,信号的脉冲宽度是微秒级,
约10%,相比于基于回波探测的数量统计法,本文设
不同的脉宽对应不同的探测距离以及分辨力。
计的算法提高了计数准确率。
本次试验共记录 12个航段,每个航段的路线长
总目标个数统计偏差产生的原因是多方面的。
度、探测面积以及目标个数统计如表1所示。
首先本文利用EKF对目标状态进行估计,假设了状
根据表 1 的数据计算获得鱼群的平均面密
态转移矩阵采用匀速直线运动模型,但在真实的水
度 为 0.0811 尾/m , 结 合 水 域 的 实 际 占 地 面 积
2
下环境,鱼类运动模型多种多样,且互相转换,因此
6
5.56 × 10 m ,获得目标总个数为4.51 × 10 。
2
5
需对目标运动建模展开深入探讨。其次,当目标在
3.2 结果分析与讨论 水底运动时,目标强度极有可能与水底的碎石、水
为了验证目标提取与跟踪计数算法的准确性, 草等杂物的强度值接近,出现目标时隐时现的情况,
选取两段声呐数据与人工计数比对。其中人工计 导致目标提取错误或跟踪轨迹断裂而重复计数,因
数,是通过人眼对每一帧图像中的目标进行一个一 此需结合水下目标强度特性展开具体分析。
个计数,并将三次计数结果的平均值作为该次计数 对于整片水域中鱼群数量估计,也有很多因素
值。选取的第一段数据由144帧图像组成,第二段数 导致误差的产生。首先是来自成像声呐本身的缺
据由 214 帧图像组成,分别对每段数据中的目标个 点,DIDSON 自带 0.42 m 的近端探测盲区,当声呐