
Page 279 - 应用声学2019年第4期
P. 279
第 38 卷 第 4 期 郭政等: 基于变分模态分解和对称相关的目标舰船线谱检测 739
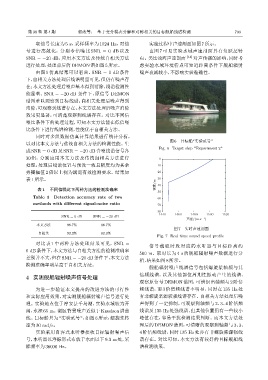
取信号长度为 5 s,采样频率为 1024 Hz,对信 实验过程中声速剖面如图7所示。
号进行离散化,分别令信噪比 SNR = 0 dB 以及 由图 7 可见实验水域声速剖面具有负跃层特
SNR = −20 dB,应用本文方法及传统自相关方法 点。类比浅海声速剖面 [14] 对声传播的影响,同时考
进行处理,处理前后的DEMON谱如图5所示。 虑实验水域环境特点可知近距离条件下舰船辐射
由图 5 仿真结果可以看出,SNR = 0 dB 条件 噪声衰减较小,不影响实验准确性。
下,自相关方法处理后线谱明显可见,但仍有噪声存
在;本文方法处理后噪声基本得到消除,线谱检测性
能显著。SNR = −20 dB 条件下,原信号 DEMON
谱图难以观察到目标线谱;自相关处理后噪声得到
消除,可观察到线谱存在;本文方法处理后噪声消除
效果更显著,可清楚观察到线谱存在。对比不同信
噪比条件下的处理过程,可知本文方法能在低信噪
比条件下进行线谱检测,性能优于自相关方法。
同时对多组数据仿真计算结果进行统计分析,
图 6 目标船“实验贰号”
以对比本文方法与传统自相关方法的检测性能。生
Fig. 6 Target ship ”Experiment 2”
成SNR = 0 dB及SNR = −20 dB含噪线谱信号各
30 组,分别应用本文方法及传统自相关方法进行 0
处理,处理后线谱位置与预设一致且幅度均为其余 10
旁瓣幅值 2 倍以上视为满足有效检测要求。结果如 20
表 1所示。 30
ງए/m 40
表 1 不同信噪比下两种方法的检测准确率
50
Table 1 Detection accuracy rate of two 60
methods with different signal-noise ratio 70
80
1440 1460 1480 1500 1520
SNR = 0 dB SNR = −20 dB
ܦᤴ/(mSs -1 )
本文方法 96.7% 86.7%
图 7 实时声速剖面
自相关 93.3% 63.3%
Fig. 7 Real time sound speed profile
对比表 1 中两种方法处理结果可见,SNR =
信号截取时段对应的水听器与目标距离约
0 dB条件下,本文方法与自相关方法的检测准确率
500 m。取时长为 4 s 的舰船辐射噪声数据进行分
差别并不大,但在SNR = −20 dB条件下,本文方法
析,结果如图8所示。
检测准确率明显高于自相关方法。
舰船辐射噪声线谱信号包括螺旋桨轴频与其
倍频线谱,以及其他部位周期性振动产生的线谱。
4 实测舰船辐射噪声信号处理
观察原信号 DEMON 谱图,可辨识出轴频与 2 阶倍
为进一步验证本文提出的改进方法的可行性 频线谱,而 3 阶倍频线谱不明显,同时在 135 Hz 处
和实际应用效果,对实测舰船辐射噪声信号进行处 有非螺旋桨源较强线谱存在。自相关方法处理后噪
理。实验地点位于淳安县千岛湖,实验水域较为开 声得到了一定抑制,可观察到轴频与 2、3、4 阶倍频
阔,水深 65 m。湖区背景噪声近似于 Knudson谱曲 线谱及 135 Hz 处强线谱,但其他位置仍有一些较小
线。目标船只为 “实验贰号”,如图 6 所示,螺旋桨转 峰值存在,容易干扰检测结果判断。而本文方法处
速为30 rad/s。 理后的 DEMON 谱图,可清晰的观察到轴频与 2、3、
实验采用自容式水听器接收目标辐射噪声信 4 阶倍频线谱,同时 135 Hz 处亦有非螺旋桨源强线
号,水听器以浮标形式布放于水面以下9.3 m处,采 谱存在。对比可知,本文方法有较好的目标舰船线
样频率为36000 Hz。 谱检测效果。