
Page 125 - 《应用声学》2019年第6期
P. 125
第 38 卷 第 6 期 王超等: 南中国海 “G-Argo” 声学浮标目标探测能力分析 1027
P↼t i↽ Pw↼f↽ Pw↼f↽
ӭ ԝᡖ Сᣂ Ix↼i֒f↽ ࣱ ᄰ
ᅺ Vxw↼f↽ ̉៨ ک வ
᧚ Vx↼t i↽ ҹᮕ Vxw↼f↽ ˲ข٨ Ց ڏ
ඵ ܫေ ᝠ வ
զ ⇁ Filter↼f↽ Сᣂ Iy↼i֒f↽ ካ ͯ
٨ Vy↼t i↽ Vyw↼f↽ Vyw↼f↽ ፒ
FFT ̉៨ § ↼f↽ ᝠ
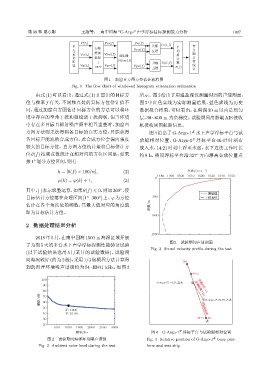
图 1 加窗直方图方位估计流程图
Fig. 1 The flow chart of windowed histogram orientation estimation
由式 (1) 可以看出,通过式 (1) 计算出的目标方 所示。图3给出了用温盐深仪测量得到的声速剖面,
位与频率 f 有关,不同频点处的目标方位估计值不 图 3 中红色实线为实际测量结果,蓝色虚线为历史
同,通过加窗直方图估计目标方位的方法可以将环 数据拟合结果,可以看出,在海深 30 m 以内是均匀
境中存在的窄带干扰和强线谱干扰抑制,但当环境 层,30∼600 m 为负梯度。试验期间用船载AIS接收
中存在多目标且辐射噪声频率相互重叠时,加窗直 机接收周围航船信息。
方图方法则无法得到各目标的真实方位,只能获得 图4给出了G-Argo-1 水下声学浮标平台与试
#
各目标声能流的合成方位,此合成方位会偏向强度 验船相对位置,G-Argo-1 浮标平台 06:07 时刻布
#
较大的目标方位。直方图方位统计是将目标估计方 放入水,14:21 时刻上浮至水面,水下连续工作时长
位θ(f) 按频点数统计在相对应的方位区间里,如果 约 8 h,期间浮标平台沿 327 方向漂离布放位置点
◦
按1 划分方位区间,则有
◦
k = [θ(f) × 180/π], (2) ܦᤴ/(mSs -1 )
1480 1490 1500 1510 1520 1530 1540 1550
0
φ(k) = φ(k) + 1, (3)
其中,[ ]表示取整运算,如果θ(f) 6 0,则加360 ,使
◦
᧚ϙ
目标估计方位落在合理区间[1 ◦ 360 ]上。φ为方位 500 લՌϙ
◦
估计在各个角度处的频数,其最大值对应的角度值 ງए/m
即为目标估计方位。
1000
2 数据处理结果分析
1500
2018年5月,在南中国海1500 m海深区域开展
图 3 试验期间声速剖面
了为期 5 天的多台水下声学浮标探测性能验证试验
Fig. 3 Sound velocity profile during the test
(以下试验结果选用 5 月某日的试验数据),试验期
间海况较好(约为2级),采用1/3倍频程方法计算得 9
到的海洋环境噪声谱级约为 54 dB@1 kHz,如图 2
100
G-Argo-1 # , 14:21, ѣඵ
90 ࠀᫎ: 8 h
80 ࠀᡰሏ 8 km
៨ጟ/dB 70 G-Argo-1 # , 06:07, Кඵ
60
50 តᰎᓕᓈጳ
X: 1000
40 Y: 53.68
30 08:15 X3
ඵ
20
500 1000 1500 2000 2500 3000
#
ᮠဋ/Hz 图 4 G-Argo-1 浮标平台与试验船相对位置
图 2 试验期间海洋环境噪声谱级 Fig. 4 Relative position of G-Argo-1 # buoy plat-
Fig. 2 Ambient noise level during the test form and test ship