
Page 127 - 《应用声学》2019年第6期
P. 127
第 38 卷 第 6 期 王超等: 南中国海 “G-Argo” 声学浮标目标探测能力分析 1029
在 10:31–13:35 时间段接收到的 AIS 信号,发现在 412461570 的工程船距离浮标平台较近,经与该工
#
10:31–13:35 时间段内共有 4 艘工程船经过浮标平 程船发送的 GPS 信息比对,G-Argo-1 浮标平台在
台,分别为:MMSI 号为 412461570 的工程船,航速 10:31–13:35 时间段内可全程探测该工程船并给出
6.4 kn,航向149 ;MMSI 号为 412480414的工程船, 其方位,由于 13:35 时刻 G-Argo-1 浮标平台的声
#
◦
航速 6.1 kn,航向 146 ;MMSI 号为 412480368 的工 学系统断电,平台开始排油上浮,浮标平台声学系统
◦
程船,航速8.9 kn,航向153 ;MMSI号为412468067 没能接收到该工程船更远距离的航行噪声信号。由
◦
的工程船,航速8.4 kn,航向148 。其中MMSI号为 以上分析可知,G-Argo-1 水下声学浮标对 MMSI
#
◦
号为 412461570、航速 6.4 kn 的工程船目标最远探
13:35
测距离大于19.3 km。
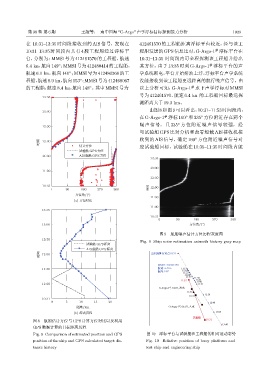
由图 8 和图 9 可以看出,10:31–11:53 时间段内,
13:00
#
在 G-Argo-1 浮标 160 和 335 方位附近存在两个
◦
◦
噪声信号,且 335 方位附近噪声信号较强,经
◦
12:30
与试验船 GPS 比对分析和查看船载 AIS 接收机接
收到的 AIS 信号,确定 160 方位附近噪声信号对
◦
ᫎ 12:00
ͥᝠவͯ 应试验船目标,试验船在 10:35–11:35 时间段内航
តᰎᓕ GPSவͯ
11:30 AISᓈᓕ GPSவͯ
13:35
13:00
11:00
12:30
10:31 12:00
1 90 180 270 360 ᫎ
வͯᝈ/(O)
11:30
(a) வͯࠫඋ
11:00
13:35
10:31
0 90 180 270 360
13:00 வͯᝈ/(O)
图 9 航船噪声估计方位历程灰度图
12:30
Fig. 9 Ship noise estimation azimuth history gray map
តᰎᓕ GPSᡰሏ
AISᓈᓕ GPSᡰሏ
ᫎ 12:00 ѣඵካͯᎶག10:31
MMSI: 412461570
11:30 ᓈᤴ: 6.4 kn 11:13
ᓈՔ:149° 11:18
11:23
11:28
11:33
11:38
11:43
11:00 11:48
11:53
G-Argo-1 # , 14:21, ѣඵ
11:53
12:20
10:31
10:31
0 5 10 15 20 12:40
ᡰሏ/km G-Argo-1 # , 06:07, Кඵ
(b) ᡰሏԋሮ 13:09
តᰎᓕ
图 8 航船估计方位与 GPS 计算方位对比以及利用 10:31
13:40
GPS 数据计算的目标距离历程
Fig. 8 Comparison of estimated position and GPS 图 10 浮标平台与试验船和工程船的相对运动态势
position of the ship and GPS calculated target dis- Fig. 10 Relative position of buoy platform and
tance history test ship and engineering ship