
Page 129 - 《应用声学》2019年第6期
P. 129
第 38 卷 第 6 期 王超等: 南中国海 “G-Argo” 声学浮标目标探测能力分析 1031
集装箱船 (MMSI563849000) 距浮标平台最远距离 13:00
为 24 km (1300 时刻),同时在 11:57–13:00 时间段
内,浮标声学系统也可计算出工程船目标方位,此 12:30
时间段工程船距浮标平台最远距离为 36.4 km。由
#
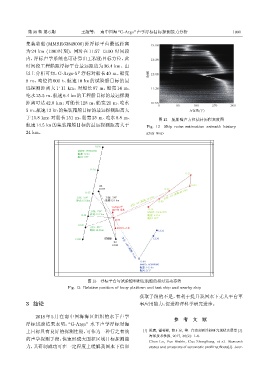
以上分析可知,G-Argo-5 浮标对船长 40 m、船宽 ᫎ 12:00
8 m、吨位约 600 t、航速 10 kn 的试验船目标的最
远探测距离大于 11 km;对船长 87 m、船宽 14 m、 11:30
吃水 25.5 m、航速 6.4 kn 的工程船目标的最远探测
距离可达 42.8 km;对船长 128 m、船宽 21 m、吃水 10:55
0 90 180 270 360
5 m、航速 12 kn 的集装箱船目标的最远探测距离大 வͯᝈ/(O)
于 15.8 km;对船长 151 m、船宽 25 m、吃水 8.8 m、
图 12 航船噪声方位估计历程灰度图
航速 14.5 kn 的集装箱船目标的最远探测距离大于 Fig. 12 Ship noise estimation azimuth history
24 km。 gray map
10:56
MMSI: 477002900
ᓈᤴ: 12 kn
ᓈՔ: 190°
11:26
11:21
X4 10:55
10:55 12:28
11:57 வͯ: 67°, ᡰሏ:40.5 km
வͯ: 319° வͯ: 330°
ᡰሏ:15.8 km ᡰሏ:15.1 km வͯ: 64°, ᡰሏ: 30.6 km 13:00
G-Argo-5 #
141938 ѣඵ 13:34
வͯ: 274° MMSI: 412461570
ᡰሏ:12.7 km
12:28 ᓈᤴ: 6.4 kn
ᓈՔ: 233°
10:55
12:45
வͯ: 251° 065916 Кඵ
ᡰሏ:14.8 km 12:22
តᰎᓕ
13:00 12:30
X3
12:28 வͯ: 148°, ᡰሏ: 24 km
13:00
MMSI: 563849000
ᓈᤴ: 14.5 kn
ᓈՔ: 212°
图 13 浮标平台与试验船和附近航船的相对运动态势
Fig. 13 Relative position of buoy platform and test ship and nearby ship
获取手段的不足,有利于提升我国水下无人平台军
3 结论 事应用能力,促进海洋科学研究进步。
2018 年 5 月在南中国海海区组织的水下声学
参 考 文 献
浮标试验结果表明:“G-Argo” 水下声学浮标对海
上目标具有良好的探测性能,可作为一种行之有效 [1] 陈鹿, 潘彬彬, 曹正良, 等. 自动剖面浮标研究现状及展望 [J].
海洋技术学报, 2017, 36(2): 1–9.
的声学探测手段,快速形成大面积区域目标探测能
Chen Lu, Pan Binbin, Cao Zhengliang, et al. Research
力,其研制成功可在一定程度上缓解我国水下信息 status and prospects of automatic profiling floats[J]. Jour-