
Page 128 - 《应用声学》2019年第6期
P. 128
1030 2019 年 11 月
向 340 航速 10 kn 航行,当试验船距离浮标平台 (MMSI477002900)噪声信号,根据GPS数据计算方
◦
#
小于 2 km 时,G-Argo-1 浮标平台声学系统接收 位确定为集装箱船(MMSI477002900) 目标,此时间
到的试验船噪声信号强于工程船噪声信号,而在 段集装箱船 (MMSI477002900) 距浮标平台最远距
其他时间段,工程船噪声信号则强于试验船噪声 离为 15.8 km (11:54 时刻)。12:45–13:00 时间段内,
信号。 G-Argo-5 # 浮标声学系统根据 GPS 数据计算方位
#
图 11 给 出 了 G-Argo-5 浮 标 平 台 在 10:55– 确定为集装箱船 (MMSI563849000)目标,此时间段
13:00 时 间 段 内 声 学 系 统 计 算 输 出 的 航 船 噪 声
ͥᝠவͯ 570ᓈᓕGPSவͯ
估计方位历程与试验船、MMSI412461570 工程 តᰎᓕGPSவͯ 900ᓈᓕGPSவͯ
849ᓈᓕGPSவͯ
船、MMSI477002900 集装箱船 (船长 128 m、船宽
13:00
21 m、吃水5 m)和MMSI563849000集装箱船(船长
151 m、船宽 25 m、吃水 8.8 m) 的 GPS 计算方位历
#
程对比,以及各航船相对于 G-Argo-5 浮标平台的 12:30 ᬷᜉኸ
#
GPS 数据计算距离历程。图 12 是 G-Argo-5 浮标 ᓕᡰሏ
24 km
声学系统在 10:55–13:00 时间段内接收到的航船噪
声估计方位历程灰度图,图13为该时间段内各船只 12:00
的相对运动态势图。 ᫎ ᬷᜉኸᓕ
ᡰሏ15.8 km
通过查看船载 AIS 接收机在 10:55–13:00 时间 តᰎᓕᡰሏ11 km
段接收到的 AIS 信号,发现浮标平台附近只有 11:30 ࢺሮᓕᡰሏ42.8 km
MMSI477002900 集装箱船、MMSI563849000 集装
箱船和试验船,而没有发现工程船的 AIS 信号。
10:55–13:00 时间段内工程船的位置点是通过 13:34
10:55
1 90 180 270 360
时刻工程船的位置点、航向、航速及船讯网搜索工程
வͯᝈ/(O)
船历史航迹综合推算得出的,工程船在 10:55–11:21 (a) வͯࠫඋ
时间段内航速 6.4 kn、航向 4 ,11:21–13:00 时间段
◦
តᰎᓕGPSᡰሏ 900ᓈᓕGPSᡰሏ
内航速6.4 kn、航向233 。在10:55–13:00 时间段内, 570ᓈᓕGPSᡰሏ 849ᓈᓕGPSவͯ
◦
MMSI477002900 集装箱船航速 12 kn、航向 190 , 13:00
◦
MMSI563849000 集装箱船航速 14.5 kn、航向 212 ,
◦
试验船在 10:55–12:28 时间段内航速 10 kn、航向
12:30
160 ,12:28–13:00时间段内试验船停止。
◦
由 图 11 和 图 12 可 以 看 出,10:55–11:12 时 间
#
段内,G-Argo-5 浮标声学系统主要接收工程船 12:00
噪声信号,根据 GPS 数据计算方位确定为工程 ᫎ
船目标,此时间段工程船距离浮标平台最远达
42.8 km(11:12 时刻),此时工程船与浮标平台距离
11:30
较远,浮标声学系统接收工程船目标信号信噪比较
低,因此目标估计方位的均方根误差较大 (约 30 )。
◦
#
11:12–11:54 时间段内,G-Argo-5 浮标声学系统主
10:55
要接收试验船航船噪声信号,根据GPS 计算方位确 0 10 20 30 40
定为试验船目标,由于浮标推算位置存在偏差,因 ᡰሏ/km
(b) ᡰሏԋሮ
此试验船目标计算方位与 GPS 数据计算给出的真
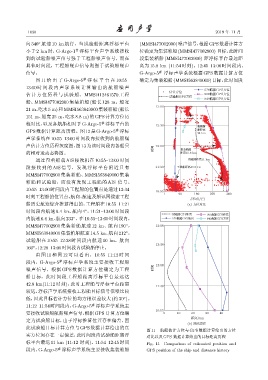
图 11 航船估计方位与 GPS 数据计算给出的方位
实方位间存在一定偏差,此时间段内试验船距离浮 对比以及 GPS 数据计算给出的目标距离历程
标平台最远 11 km (11:12 时刻)。11:54–12:45 时间 Fig. 11 Comparison of estimated position and
#
段内,G-Argo-5 浮标声学系统主要接收集装箱船 GPS position of the ship and distance history