
Page 42 - 《应用声学》2020年第1期
P. 42
38 2020 年 1 月
其中,D e 为电位移,ρ v 为体积电荷密度。 2 测量系统及实验装置
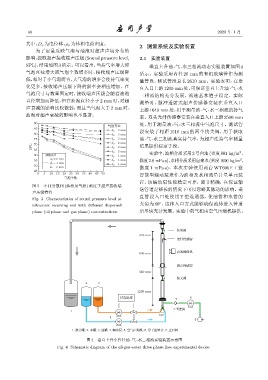
为了定量反映气泡与油泡对超声声场分布的
影响,提取超声接收端声压级(Sound pressure level, 2.1 实验装置
SPL),结果如图 3所示。可以看出,当持气率增大即 垂直上升油 -气 -水三相流动态实验装置如图 4
气泡直径增大或气泡个数增多时,接收端声压级降 所示。实验采用内径 20 mm 的有机玻璃管作为测
低,相对于小气泡而言,大气泡的增多会使持气率变 量管段,测试管段总长 2610 mm。实验表明,在垂
化更多,接收端声压级下降的斜率会相应增加。在 直入口上游 1200 mm 处,可保证垂直上升油 -气-水
气泡尺寸与数量固定时,接收端声压级会随着油泡 三相流结构充分发展,流速基本趋于稳定。实际
直径增加而降低,但在油泡直径小于2 mm时,对超 测量时,脉冲透射式超声传感器安装在垂直入口
声衰减的影响比较微弱,而且当气泡大于 2 mm 时, 上游 1640 mm 处,用于测量油 -气-水三相流的持气
油泡对超声衰减的影响也不显著。
率。双头光纤传感器安装在垂直入口上游2500 mm
90 处,用于测量油 -气 -水三相流中气泡尺寸。测试管
ඡจᄰय़
85
d g =3 mm 段安装了相距 1510 mm 的两个快关阀,用于获取
80 d g =3 mm
75 d g =3 mm 油 -气 -水三相流真实持气率,为超声法持气率测量
d g=2 mm
70
SPL d g =2 mm 结果提供标定手段。
65
d g =2 mm 3
60 ෴จᄰय़ d g=1 mm 实验中,油相介质采用3号白油(密度801 kg/m ,
d o =0 mm 3
55 d g =1 mm 黏度2.8 mPa·s),水相介质采用自来水(密度1000 kg/m ,
d o =1 mm
50 d o =2 mm d g =1 mm 黏度 1 mPa·s)。本次实验使用两台 WT600F 工业
45
0 5 10 15 20 25 30 35 40 45 50 智能型蠕动泵来作为油相及水相流量计量单元装
ඡจ˔
置,该蠕动泵性能稳定可靠,调节精确,在保证输
图 3 不同分散相 (油相及气相) 浓度下超声接收端
送管道足够长的情况下可以忽略其脉动的影响。垂
声压级特性
直管段入口处使用 Y 型连通器,使油管和水管的
Fig. 3 Characteristics of sound pressure level at
◦
ultrasonic receiving end with different dispersed 夹角为 60 ,这种入口方式能够确保流体进入管道
phase (oil phase and gas phase) concentrations 后尽快充分发展。实验中的气相由空气压缩机提供,
ঌТ
310 mm
Аጜ͜ਖ٨
ᰴᤴϸ
860 mm
ᡔܦ͜ਖ٨
340 mm
ঌТ
2 3
1200 mm
҄ጇፒ 7 6
Yیᤌଌ
1
60O
4
5
1 ຉՌᎩ 2 ඵᎩ 3 ෴Ꭹ 4 ᛖүด 5 ቇඡԍ᎖ 6 ๏ߕื᧚ᝠ 7 ൣڀ
图 4 垂直上升小管径油 -气 -水三相流实验装置示意图
Fig. 4 Schematic diagram of the oil-gas-water three phase flow experimental device