
Page 92 - 《应用声学》2020年第2期
P. 92
250 2020 年 3 月
1100
ᄾࠄϙ
వAIMMካข
1050
yவՔʽͯᎶ/m 1000 [6]ካข
͜ፒIMMካข
[8]ካข
950
900
750 760 770 780 790 800 810 820
xவՔʽͯᎶ/m
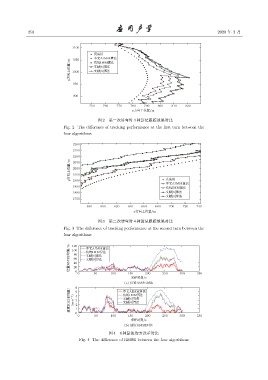
图 2 第一次转弯时 4 种算法跟踪效果对比
Fig. 2 The difference of tracking performance at the first turn between the
four algorithms
2200
2150
2100
yவՔʽͯᎶ/m 2000
2050
1950
ᄾࠄϙ
1900
వAIMMካข
1850 ͜ፒIMMካข
1800 [6]ካข
[8]ካข
1750
580 600 620 640 660 680 700 720 740
xவՔʽͯᎶ/m
图 3 第二次转弯时 4 种算法跟踪效果对比
Fig. 3 The difference of tracking performance at the second turn between the
four algorithms
ͯᎶRMSEکϙ/m 100 వAIMMካข
120
͜ፒIMMካข
80
[6]ካข
60
[8]ካข
40
20
0
0 50 100 150 200 250 300 350
᧔ನ҉/s
(a) ͯᎶRMSEࠫඋ
6 5 వAIMMካข
ᤴएRMSEکϙ/ (mSs -1 ) 4 3 2 ͜ፒIMMካข
[6]ካข
[8]ካข
1
0
0 50 100 150 200 250 300 350
᧔ನ҉/s
(b) ᤴएRMSEࠫඋ
图 4 4 种算法均方误差对比
Fig. 4 The difference of RMSE between the four algorithms