
Page 126 - 《应用声学》2020年第4期
P. 126
612 2020 年 7 月
步长调节相结合,减弱了两者的相互影响,降低了系
0 引言
统的建模误差。但该算法未对附加辅助噪声进行控
有源噪声控制 (Active noise control, ANC) 主 制,因此降噪量较低。
要应用于低频噪声控制领域,其原理是基于声波的 Xiao 等 [10] 提出对附加白噪声进行控制的策
相干相消 [1] 。目前有源噪声控制系统应用最广的算 略,对建模步长值进行分段调控,并设置相应阈值,
法是 FXLMS 算法 [2] ,该算法需要预先获得次级通 当步长值及误差值同时达到指定阈值时停止注入
道的信息,即获得控制信号到误差传感器的传递函 辅助噪声。该算法在降噪量和收敛速度方面均有较
数。在ANC系统中,次级通道建模的准确性直接影 大提升,但算法涉及参数较多,环境发生变化时,需
响系统的降噪性能,次级通道建模分为离线建模和 要重新调节阈值。袁军等 [11] 提出另一种针对附加
在线建模 [3] 。在线建模可以保证算法的精确性和实 白噪声进行控制的方法,利用误差函数来判断ANC
时性,它能对参数进行实时更新,当次级通道发生 系统的状态,当系统达到稳定状态时停止注入辅助
变化时能让系统快速恢复到稳定状态,但建模信号 白噪声,当系统发生突变时再重新注入辅助噪声进
的引入会影响系统降噪量及收敛速度,同时存在控 行建模。该方法提高了次级通道的收敛速度及建模
制信号与建模信号相互干扰的问题 [4] 。因此,降低 精度,但未考虑建模信号对控制模块的影响,从而导
建模信号和控制信号的相互影响、减弱建模辅助噪 致建模误差不稳定且误差值较大。
声对系统的影响,是有源噪声控制需要考虑的重要 以上算法均未同时考虑附加建模信号对系统
问题。 的影响以及建模信号与控制信号的相互影响。本文
Eriksson 等 [5] 首次提出利用附加随机白噪声 提出一种基于能量比调控的次级通道在线建模方
作为建模信号,对次级通道进行在线建模的策略。 法,改善建模信号与控制信号的相互影响,同时降低
该方法改善了次级通道参数不能实时更新的缺点, 附加白噪声给系统带来的误差。
但附加建模信号与控制信号之间存在相互干扰,大
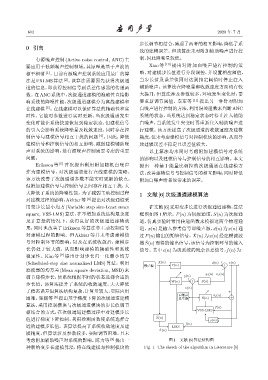
大降低了系统的降噪性能。为了减弱主动控制过程 1 文献[6]次级通道建模算法
对建模过程的影响,Akhtar等 [6] 提出对次级通道采
用变步长最小均方 (Variable step size-Least mean 在文献[6]采用变步长进行次级通道建模,算法
square, VSS-LMS) 算法,在不增加系统结构复杂度 框图如图 1 所示。P(n) 为初级通道,S(n) 为次级通
及计算量的情况下,获得良好的次级通道建模效 道,仿真实验时常用传递函数来模拟这两个物理通
果,同时也改善了 Eriksson 等算法中主动控制信号 道。x(n) 是输入参考信号即噪声源,d(n) 为x(n) 通
对建模过程的影响。但 Akhtar 等并未考虑建模信 过P(n)输出的期望信号。X(n)为x(n)经建模滤波
ˆ
号对控制环节的影响,以及在系统收敛后,建模步 器S(n)而得的输出信号,该信号为控制环节的输入
ˆ
长仍处于较大值,从而影响建模的精确性和系统 信号。其中e(n)为该系统的残余误差信号,f(n)为
稳定性。Kim 等 [7] 提出计划步长归一化最小均方
(Scheduled-step size normalized LMS) 算法,利用 X↼n↽ d↼n↽ ⇁ e↼n↽
٪ܦູ P↼n↽ ⇁
滤波器的均方差(Mean square deviation, MSD) 来 −
y s↼n↽֓v s↼n↽
调节建模步长,使系统根据不同的状态选择合适的 y↼n↽
⇁
W↼n↽ ⇁ S↼n↽
步长值。该算法提升了系统的收敛速度,大大降低 −
v↼n↽
了稳态误差但算法结构复杂,计算量较大,实际应用 ⇁
ᄇ٪ܦ ^ −
v s↼n↽
^
困难。张丽等 [8] 提出基于梯度下降的次级通道建模 ԧၷ٨ S↼n↽ ⇁
算法,采用控制模块与次级通道模块的步长值调节
f↼n↽
相结合的方式,在次级通道建模过程中对建模步长 VSS¹LMS
^
值进行梯度下降控制,利用检测函数使系统选择合 S↼n↽ ρ↼n↽
f↼n↽
适的建模步长值。该算法提高了系统收敛速度及建 LMS
^
X↼n↽
模精度,但算法涉及参数较多,实际调节困难,且未
考虑附加辅助噪声对系统的影响。陈力等 [9] 提出一 图 1 文献 [6] 算法结构图
种新的变步长建模算法,将在线建模与控制模块的 Fig. 1 The sketch of the algorithm in Literature [6]