
Page 127 - 《应用声学》2020年第4期
P. 127
第 39 卷 第 4 期 肖梦迪等: 一种能量比调控的有源噪声控制算法 613
建模滤波器及主滤波器的误差信号,两者能量分别 P f (n)
ρ(n) = , (3)
定义为 P e 、P f ,如式 (1)、式 (2) 所示,两者之比为 P e (n)
ρ(n),如式(3)所示。式(4)中µ s min 为最小建模步长 µ s (n) = ρ(n)µ s min + [1 − ρ(n)]µ s max , (4)
值,µ s max 最大建模步长值,其值由实验得出。 f(n) = e(n) − ˆv s (n)
该算法的建模步长值随着 ρ(n) 的变化进行调
= [d(n) − y s (n)] + [v s (n) − ˆv s (n)]. (5)
整,d(n) − y s (n) 为控制环节对建模环节的影响。
在系统初始阶段,控制模块并未开始收敛,因此 文献[6]算法提高了系统建模精度,但该法并未
d(n) − y s (n) 的误差较大,此时P[d(n)] ≫ P[v s (n)], 考虑建模信号对控制信号的影响以及附加辅助噪
即有 ρ(n) ≈ 1,为了保持建模环节及控制环节的稳 声给系统带来的误差。同时当系统收敛时,次级通
定性,建模步长值应采用小步长。随着系统逐渐收 道建模步长值仍处于较大值,对系统的建模准确性
敛,d(n) − y s (n) 逐渐变小,控制模块的能量逐渐减 及稳定性造成了一定的影响。
弱,建模信号对控制模块的影响逐渐变大,ρ(n) 约
为 0,此时建模步长值应采用较大值。文献 [6] 算法 2 本文算法
的调节公式如下:
为改善文献 [6] 算法中控制模块和次级建模模
2
P e (n) = λP e (n − 1) + (1 − λ)e (n), (1)
块更新的相互影响以及附加辅助噪声对系统的影
2
P f (n) = λP f (n − 1) + (1 − λ)f (n), 响,本文提出一种基于能量比调控的在线建模有源
0.9 < λ < 1, (2) 噪声控制算法。改进算法如图2虚线框内所示。
X↼n↽ d↼n↽ ⇁ e↼n↽
٪ܦູ P↼n↽
−
y↼n↽
⇁ y s ↼n↽֓v s ↼n↽
W↼n↽ S↼n↽
֓
v↼n↽
⇁
ᄇ٪ܦ ^ ^ −
v s ↼n↽
ԧၷ٨ S↼n↽
µ s
G↼n↽ f↼n↽
ካ C↼n↽
ข µ s
ஈ
^ ᤉ
S↼n↽
൦᫂
҄ P f ↼n↽
^
X↼n↽ ρ↼n↽/ P e ↼n↽
VSS-LMS f↼n↽
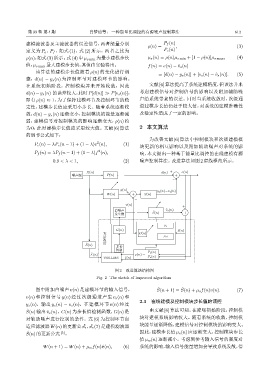
图 2 改进算法结构图
Fig. 2 The sketch of improved algorithm
ˆ
图中附加白噪声 v(n) 是建模环节的输入信号, S(n + 1) = S(n) + µ s f(n)v(n). (7)
ˆ
v(n) 和控制信号 y(n) 经过次级通道产生 v s (n) 和
2.1 在线建模及控制模块步长值的调控
y s (n),输出 y s (n) − v s (n),在建模环节 v(n) 经过
ˆ
S(n) 输出 ˆv s (n)。C(n) 为步长值检测函数,G(n) 是 由文献 [6] 算法可知,在降噪初始阶段,控制模
对辅助噪声进行控制的条件。式 (6) 为控制环节自 块对建模系统影响较大。随着系统的收敛,控制模
适应滤波器W(n) 的更新公式,式(7) 是建模滤波器 块能量逐渐降低,建模信号对控制模块的影响变大。
ˆ
S(n)的更新公式 [5] 。 因此,建模步长值 µ s (n) 应逐渐变大,控制模块步长
值µ w (n) 逐渐减小。考虑到参考输入信号的强度对
W(n + 1) = W(n) + µ w f(n)ˆx(n), (6) 系统的影响,输入信号能量增加会导致系统发散,信