
Page 11 - 《应用声学》2020年第5期
P. 11
第 39 卷 第 5 期 刘炎堃等: 基于路径选择的深海水下运动目标被动深度估计 653
50 50
100 100 णϙ/s
ງए/m 150 ງए/m 150 0.35
200 200 0.30
250 250
0.25
300 300
2 3 4 5 6 7 8 9 10 11 12 2 3 4 5 6 7 8 9 10 11 12
ᡰሏ/km ᡰሏ/km 0.20
(a) 2320 m (b) 2370 m
0.15
50 50
0.10
100 100
ງए/m 150 ງए/m 150 0.05
200 200 0
250 250
300 300
2 3 4 5 6 7 8 9 10 11 12 2 3 4 5 6 7 8 9 10 11 12
ᡰሏ/km ᡰሏ/km
(c) 3020 m (d) 3370 m
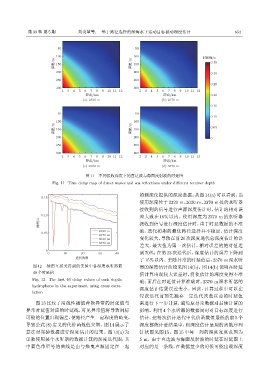
图 11 不同接收深度下的直达波与海面反射波的时延图
Fig. 11 Time delay map of direct waves and sea reflections under different receiver depth
的测深仪提供的深度数据;从图 14(a) 可以看到,当
0.15
使用深度位于 2320 m、3020 m、3370 m处的水听器
接收到的信号进行声源深度估计时,估计的相对误
0.10 差大致在 10% 以内。使用深度为 2370 m 的水听器
ᫎ/s 接收到信号进行深度估计时,由于时延数据的不准
2320 m 确,迭代初期的最优路径选择并不稳定,估计深度
0.05
2370 m
3020 m 变化较大,导致在前20次深度迭代总深度估计的误
3370 m
差大,最大值为第一次估计,相对误差的绝对值达
0
0 10 20 30 40 到 70%;在第 23 次迭代后,深度估计的误差下降到
ᤖ̽
了15% 以内。去除异常的时延值后,2370 m 深水听
图 12 使用互相关得到的实验中各深度水听器前 器的深度估计曲线见图14(b)。图14(b)说明在时延
40 个时延值
值计算出现较大误差时,将使估计的深度变得不准
Fig. 12 The first 40 delay values of each depth
确;而后在时延值计算准确时,2370 m 深水听器的
hydrophone in the experiment using cross corre-
深度估计结果误差变小。因此,计算过程中可以在
lation
每次迭代前预先抛弃一定迭代次数以前的时延值
图 13 比较了用线性插值替换异常的时延值与 来进行下一步计算,避免原异常数据对后续计算的
异常时延值对应的时延线,可见异常值将导致目标 影响。利用 4 个水听器的数据同时对目标深度进行
可能的位置出现偏差,使路径产生一定程度的畸变, 估计,把每次估计迭代中代价函数值最低的前 5 个
导致公式 (8) 定义的代价函数值突增。图 14展示了 深度都统计进结果中,则深度估计呈现的离散序列
算法对实验数据进行深度估计的结果。图 14(a) 为 针状图见图 15。图 15 中每一列的深度宽度范围为
单独使用某个水听器的数据计算的深度迭代图,其 5 m。由于直达波与海面反射波的时延在时延图上
中蓝色带星号的曲线是由与拖曳声源固定在一起 对应的是一条线,在数据量少的时候可能出现深度