
Page 9 - 《应用声学》2020年第5期
P. 9
第 39 卷 第 5 期 刘炎堃等: 基于路径选择的深海水下运动目标被动深度估计 651
۳̆࠱ጳവی Ѿၹण ӵ࠷డ Ѿၹͥᝠ ۳̆ឨࣀ
๒ภဗܒ ᝠካՊ˔ඵզ ڏᝠካѣ ฉࠫय़ ͯᎶᄊ ࠵ᄊय़
Ԡ ٨ࠫऄᄊܦູ ϋᤥᄊᤂ ᤉᛡᤂү णѼலͥ ጸᤉᛡງ
णڏ үय़ ͥᝠ ᝠឨࣀ एͥᝠ
ႀඵզ٨ଌஆηՂ
˗ᖍԩᄰฉ֗๒
᭧Ԧ࠱ฉᄊण
ᤖ̽
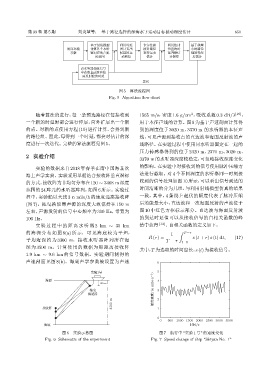
图 5 算法流程图
Fig. 5 Algorithm flow chart
随着算法的进行,每一条预选路径在每接收到 1565 m/s,密度 1.6 g/cm ,吸收系数 0.3 dB/λ [16] ,
3
一个新的时延时都会进行伸展,向外扩展出一个新 用于本征声线的计算。图9 为基于声速剖面计算得
的点。对新的点使用方程 (10) 进行计算,会得到新 到的深度位于 3020 m、3370 m 的水听器的本征声
的路径组。因此,每得到一个时延,都会对估计的深 线,可见声源到接收点的直达波和海面反射波的声
度进行一次迭代。完整的算法流程见图5。 线路径。在实验过程中使用同水听器固定在一起的
压力传感器得到的位于 2320 m、2370 m、3020 m、
2 实验介绍
3370 m的水听器深度较稳定,可忽略接收深度变化
实验的数据来自 2018 年春季在南中国海某次 的影响。在实验中对接收到的信号使用脉冲压缩方
海上声学实验。实验采用单船结合接收阵垂直潜标 法进行截取。对 4 个不同深度的水听器同一时刻接
的方式,接收阵为非均匀分布在120 ∼ 3408 m深度 收到的信号处理如图10所示,可以看出信号到达的
范围的 24 阵元的水听器阵列,如图 6 所示。实验过 时间清晰的分为几组,与利用射线模型仿真的结果
程中,实验船以大致 3 n mile/h 的速度远离接收阵 一致,其中,4 条线上起伏的幅度代表了脉冲压缩
(图 7)。拖曳换能器声源的深度大致保持在 150 m 后的能量大小,直达波和一次海面反射的声波位于
左右,声源发射的信号中心频率为 300 Hz,带宽为 图 10 中红色方框标示部分。直达波与海面反射波
100 Hz。 的到达时延值可以从接收信号的自相关函数的峰
实验过程中的距离水听器 2 km ∼ 35 km 值中获得 [13] 。自相关函数的定义如下:
的海深分布如图 8(a) 所示,可见海底较为平坦, 1 ∫ T −τ
R (τ) = s (t + τ) s (t) dt, (17)
平均海深约为 3300 m,接收水听器阵列所在海 T − τ
t=0
深为 3500 m。计算使用的数据为船距离接收阵
其中,T 为选取的时间窗长,s (t)为接收信号。
1.9 km ∼ 9.6 km 的信号数据。实验期间测得的
声速剖面见图 8(b)。海底声学参数被设置为声速 6
ࠄᰎ1Ղ 5
๒᭧ 4
150 m
ફఝ ᓈᛡᤴए/(n mileSh -1 ) 3
૱ᑟ٨
3500 m 2
ଌஆ 1
0
0 500 1000 1500 2000 2500 3000 3500
๒अ ᫎ/s
图 6 实验示意图 图 7 航行中 “实验 1 号” 的速度变化
Fig. 6 Schematic of the experiment Fig. 7 Speed change of ship “Shiyan No. 1”