
Page 12 - 《应用声学》2020年第5期
P. 12
654 2020 年 9 月
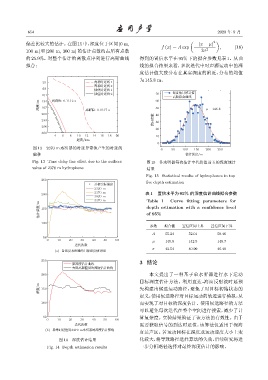
偏差比较大的估计。在图15中,深度位于区间[0 m, ( − (x − µ) 2 )
f (x) = A exp , (18)
100 m] 和[200 m, 300 m]的估计点数约占所有点数 2σ 2
的 25.9%。对整个估计的离散点序列进行高斯曲线 得到的置信水平在 95% 下的拟合参数见表 1。从曲
拟合: 线的拟合结果来看,多次迭代中对声源运动中的深
度估计值大致分布在真实深度的附近,分布的均值
为145.8 m。
35 ሏᏆणጳ 1
ሏᏆणጳ 2
68 ଣϙणጳ 1
ଣϙणጳ 2 70 ງएͥᝠፒᝠϙ
101
ᰴளલՌజጳ
60
ሏᏆϙ: 0.1112 s
ງए/m 134 ሏᏆϙ: 0.0137 s 50 µ=145.8
167
200 40
233 ፒᝠ 30
266
20
300
4 6 8 10 12 14 16 18 20 10
ᡰሏ/km
0
图 13 2370 m 水听器的时延异常值产生的时延线 0 50 100 150 200 250
偏移 ͥᝠງए/m
Fig. 13 Time delay line offset due to the outliers 图 15 各水听器每次估计中代价值前五的深度统计
value of 2370 m hydrophone 结果
Fig. 15 Statistical results of hydrophones in top
250 five depth estimation
ᄬಖࠄᬅງए
2320 m
2370 m
200 表 1 置信水平为 95% 的深度估计曲线拟合参数
3020 m
3370 m Table 1 Curve fitting parameters for
ͥᝠງए/m 150 depth estimation with a confidence level
of 95%
100
参数 拟合值 置信区间上界 置信区间下界
A 55.24 52.01 58.46
50
0 10 20 30 40 50 60 µ 145.8 142.9 148.7
ᤖ̽
σ 43.54 40.90 46.48
(a) Պງएඵզ٨ᄊᄬಖງएͥᝠڏ
250 3 结论
Ԕງएͥᝠజጳ
ԝᬔሏᏆϙՑᄊງएͥᝠజጳ
200 本文提出了一种基于单水听器进行水下运动
目标深度估计方法。利用直达 -海面反射波时延预
ງए/m 150 先构建出候选运动路径,避免了对目标初始状态的
定义;使用候选路径对目标运动的轨迹进行模拟,从
100 而实现了对目标的深度估计。使用候选路径的方法
可以避免每次迭代在整个空间进行搜索,减少了计
50 算复杂度。实验结果验证了该方法的有效性。由于
0 10 20 30 40 50 60
ᤖ̽ 需要获取信号的到达时延值,该算法仅适用于深海
(b) पणϙࠫ2370 mඵզ٨ᄊງएͥᝠॖ־
直达声区。若运动目标在深度或运动速度大小上变
图 14 深度估计结果 化较大,将导致路径选择算法的失效,后续研究将进
Fig. 14 Depth estimation results 一步分析路径选择对最终深度估计的影响。