
Page 62 - 《应用声学》2021年第3期
P. 62
380 2021 年 5 月
频率,当∆V > 0 时,减小频率;当∆V = 0 时,频率 考值进行比较,比较后的偏差量作为PI 控制器的输
保持不变;当∆V < 0时,增大频率。 入,经过 PI 控制后获得需要改变的频率量并与当
前频率进行相加,从而获得新的驱动频率,系统程序
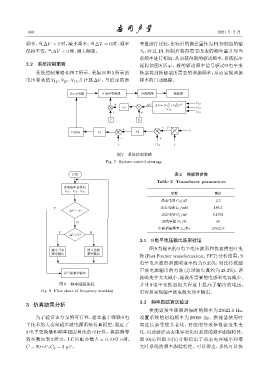
2.2 系统控制策略 流程如图 8 所示。新的驱动频率信号驱动 9 电平变
系统控制策略如图 7 所示,采集如图 5 所示的 换器得到换能器所需要的谐振频率,从而实现谐振
电压有效值 V 12 、V 23 、V 13 并计算 ∆V ,与给定的参 频率的自动跟踪。
Buckႃ 9 ႃࣱԫ૱٨ ӜᦡᎪፏ ૱ᑟ٨
+ - DV DV/↼V ⇁V ↽ ⊳ V 12
2
2
PI V 23
֓V
+ + V 13
f 0
+ - P
PWM PI PI U
- +
I P ref I
图 7 系统控制策略
Fig. 7 System control strategy
नݽ 表 2 换能器参数
Table 2 Transducer parameters
឴ԩႃԍదϙ
V 12 njV 13 njV 23
参数 数值
静态电容 C 0 /nF 2.3
Y 动态电感 L 1 /mH 188.3
DV=0
动态电容 C 1 /nF 0.1763
N 动态电阻 R 1 /Ω 40
串联谐振频率 f s/Hz 27622.9
Y N
DV0
3.1 9电平电压输出波形验证
图 9 为输出的 9 电平电压波形和快速傅里叶变
ѓ࠵ेҒ ܙܸेҒ
ᮠဋᣥѣ ᮠဋᣥѣ
换(Fast Fourier transformation, FFT)分析结果。9
电平电压波形谐波畸变率约为 9.35%,对比传统超
声波电源输出的方波 (总谐波失真约为 48.3%),谐
̿ेҒᮠဋᣥѣ
波畸变率大大减小,滤波所需要的电感和电容减少。
图 8 频率跟踪流程 并且 9 电平变换器很大程度上提高了输出的电压,
Fig. 8 Flow chart of frequency tracking 更容易实现超声波电源大功率输出。
3.2 频率跟踪算法验证
3 仿真结果分析
换能器发生串联谐振时的频率为 27622.9 Hz,
为了验证该方案的可行性,建立基于级联 9 电 设置系统的初始频率为 26000 Hz。换能器使用时
平技术的大功率超声波电源系统仿真模型,验证了 间过长会导致其老化,对应的等效参数会发生变
9 电平变换器和频率跟踪算法的可行性。换能器等 化,以此验证动态电容变化时系统的频率跟踪特性。
效参数如表 2 所示。LC 匹配参数 L = 0.1047 mH、 图 10(a) 和图 10(b) 分别给出了动态电容减小和增
C = 90 nF、C 2 = 3 µF。 大时系统的频率跟踪特性。可以得出,系统可以快