
Page 90 - 《应用声学》2021年第3期
P. 90
408 2021 年 5 月
基于采样重要性重采样 (Sampling importance re-
0 引言
sampling, SIR) [15] 粒子滤波器,提出了一种适用于
多基地声呐系统的多普勒信息辅助目标定位与跟
多基地主动声呐是指将发射机与接收机部署
踪算法。该算法首先建立了多基地主动探测系统
在不同位置的声呐探测系统。这种配置方式可以灵
活地覆盖探测范围 [1] ,有利于保证接收平台的隐蔽 中多普勒频移与目标速度分量的关系模型,然后利
性,并且可以降低混响干扰 [2] 。多基地探测是目前 用该关系对SIR算法重采样过程中的速度值进行约
声呐探测技术领域的研究热点,围绕多基地声呐中 束,修正粒子的速度值,使重采样后的粒子集合更
服从目标真实状态的后验概率分布,进而提升目标
的回波检测、定位、跟踪等问题已有较多的研究。文
定位跟踪算法的精度。本文将该算法称为多普勒
献[3]介绍了多基地主动声呐中的定位方法,并详细
分析了各测量值误差所导致的定位误差。文献 [4] 信息辅助SIR算法,简称DA-SIR (Doppler-assisted
SIR)算法。通过单次仿真实验对算法原理进行了验
对融合多基地时延、方位观测信息的目标跟踪方法
进行了研究,提出了一种自动跟踪算法,并通过仿真 证,蒙特卡洛仿真实验结果也进一步表明,所提出的
算法可以有效地利用多普勒信息提升定位与跟踪
数据和实测数据进行了验证。文献 [5] 提出了一种
精度,且具有较高的稳定性。
贝叶斯定位方法,利用贝叶斯框架有效地融合多传
感器测量信息以提高定位精度。
1 多基地声呐探测系统
目前的多基地声呐探测系统主要通过测量目
标回波的时延和方位信息进行定位与跟踪,由于水 1.1 多基底声呐定位原理
下环境复杂,声速、时延和方位测量值不可避免地存 多基地声呐探测系统实现目标定位,除观测量
在测量误差,影响了定位精度,要进一步提高定位与 外还需要平台的同步信息,即需要准确知道探测平
跟踪算法的精度,需要更多的辅助信息。多普勒频 台间的相对位置以及平台的同步时间。为了方便分
移是声呐探测系统中重要的目标观测量,它反映了 析且不失一般性,以多基地声呐的基本形式双基地
目标在运动中的速度和距离变化情况,多普勒频移 声呐为例,并做以下假设:已知接收机和发射机坐
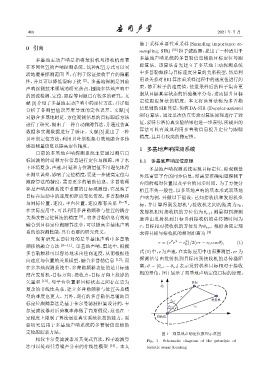
与目标位置、速度,平台位置、速度都有关系 [6−7] 。 标,并计算得到发射机与接收机之间的距离为 r 0 ,
在实际应用中,可以利用多普勒频移与位置的耦合 发射机相对接收机的方位角为 θ s-r ;测量得到探测
关系改善定位算法的精度 [8] 。将多普勒信息有效地 脉冲由发射机到目标再到接收机的总传播时间为
融合到目标定位跟踪算法中,可以提高多基地声呐 τ,目标相对接收机的方位角为 θ t-r 。根据余弦定理
系统的探测性能,具有重要的研究意义。 求得目标与接收机的相对距离为 [3]
现有研究主要针对的是单基地声呐中多普勒
2 2
2
r = (c τ − r )/2(cτ − r 0 cos θ), (1)
0
频移的融合方法 [9−11] 。单基地声呐、雷达中,根据
多普勒频移可以容易地求出径向速度,从而根据径 式(1)中,c为声速,在实际应用中也需要测量,cτ 为
探测信号由发射机到目标再到接收机的总传播距
向速度与位置的关系模型,融合多普勒信息 [12] ;而
离;θ = |θ s-r − θ t-r | 表示发射机和目标相对于接收
在多基地探测系统中,多普勒频移表征的是目标速
度在发射机 -目标方向、接收点 -目标方向上投影的 机的开角。图1展示了双基地声呐定位目标的原理。
矢量和 [13] ,与平台位置和目标状态之间存在更为 ᄬಖ
Ӓ
复杂的非线性关系,建立多普勒频移与位置关系模
型的难度也更大。另外,现有的多普勒信息辅助目 r
§ s-r ԧ࠱
标定位跟踪算法是基于卡尔曼滤波框架设计的,卡
§ t-r § r 0
尔曼滤波器对后验概率都做了高斯假设,这也在一
定程度上限制了算法逼近真实系统状态的能力。需 ଌஆ
要研究适用于多基地声呐系统的多普勒信息辅助
定位跟踪新方法。 图 1 双基地声呐定位原理示意图
相较卡尔曼滤波器及其变式算法,粒子滤波算 Fig. 1 Schematic diagram of the principle of
法可以处理任意噪声分布的非线性模型 [14] 。本文 bistatic sonar locating