
Page 93 - 《应用声学》2021年第3期
P. 93
第 40 卷 第 3 期 张蒙等: 基于粒子滤波的多普勒信息辅助目标定位跟踪算法 411
˜ n N 带入式 (17),逐一计 测量值为 1500 m/s。所有测量值中,方位测量精度
将重采样得到的 { ˙x }
k n=1
˜ n N ,并重置重采样后的粒子权值为1/N,得 为 1 ,等效声速的测量误差为 ±25 m/s,时延测量
◦
算{ ˙y }
k n=1
n n N :
到k 时刻重采样后的粒子集合为{x , w } 精度和多普勒测量精度由探测脉冲的参数决定,分
k k n=1
别为 0.01 s,0.2 Hz。根据式 (1)、式 (2) 将测量值转
x = (˜x , ˙x , ˜y , ˙y ),
n n ˜ n n ˜ n
k k k k k
n = 1, 2, · · · , N. (18) 换到地理坐标系,得到目标运动轨迹和测量值的分
w = 1/N,
n
k
布如图 2所示。
式 (7)∼(18) 构成了融合多普勒信息的 SIR 目标跟
踪算法。 15 ᢾᤜ
᧚ϙ
3 数值仿真实验及结果分析 10
ӯӒᡰሏ/km
对提出的 DA-SIR 算法进行数值仿真实验,验 ᄬಖ
证其有效性,并分析算法在引入多普勒信息后跟 5
踪性能。仿真实验中设探测系统为收发分置的
双基地声呐系统,探测平台静止,发射机位于直
ԧ࠱ ଌஆ
角坐标系的原点 S = (0, 0) m,接收机的坐标为 0
-5 0 5 10
R = (4000, 0) m。探测信号设定为 10 s 脉冲信号, ˌ᜵ᡰሏ/km
中心频率为 2000 Hz,带宽为 100 Hz,脉冲重复频
图 2 目标轨迹及测量轨迹
率为 0.05 Hz,观测时长为 1000 s;目标做匀速直
Fig. 2 Target trajectory and measurement trajectory
线运动,起始坐标为 T = (5000, 8000) m,速度为
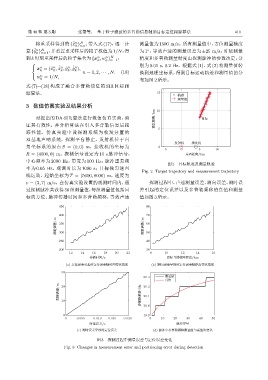
v = (3, 7) m/s。在仿真实验设置的观测时间内,通 探测过程中,声速测量误差、测向误差、测时误
过探测脉冲共获得 50组测量值,每组测量值包括目 差引起的定位误差以及多普勒频移的真值和测量
标的方位、脉冲传播时间和多普勒频移,等效声速 值如图3所示。
450 80
400 70
ᡰឨࣀ/m 350 ᡰឨࣀ/m 60
300
50
250 40
200 30
12 14 16 18 20 22 8 10 12 14 16
͜୧ᫎ/s ᄬಖˁଌஆᡰሏ/km
(a) ܦᤴឨࣀळᡑᄊࠀͯឨࣀᬤᫎԫӑৱц (b) Քឨࣀᒱᄊࠀͯឨࣀᬤᡰሏԫӑৱц
30
20.3 ᧚ϙ
ᄾϙ
ᡰឨࣀ/m 20 ܳҿᮠረ/Hz 20.2
20.1
10
19.9
0 20.0
0 0.005 0.010 0.015 0.020 0 10 20 30 40 50
णឨࣀ/s ᑢфऀՂ
(c) ឨࣀᒱᄊࠀͯឨࣀ (d) ᑢф˗ܳҿᮠረ᧚ϙˁᄾϙᄊԫӑ
图 3 探测过程中测量误差与定位误差变化
Fig. 3 Changes in measurement error and positioning error during detection