
Page 132 - 《应用声学》2021年第5期
P. 132
776 2021 年 9 月
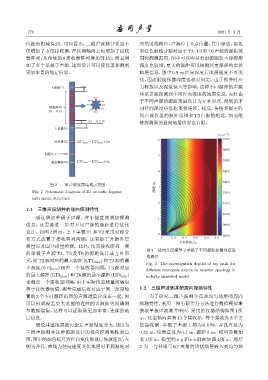
位波形相减得到。可以看出,三维声波测井仪器不 应的射线路径,声源位于 0 点位置,其中绿色、黑色
仅增加了方位接收器,在仪器轴向上也增加了接收 和红色射线分别对应于 T2、T3和T6 声源的源距范
器阵列 (从传统的 8 接收器阵列增加到 13),而且增 围和探测范围,图中可以明显看出源距较小时探测
加了多个单极子声源,这些设计可以使仪器探测到 深度也较浅,更大的源距可以探测到更深部的原状
更加丰富的地层信息。 地层信息,图中 0.9 m 径向深度后地层速度不再变
化,因而射线传播深度也相对固定。由于钻井时应
ʽӭౝT1 力释放以及泥浆侵入等影响,这种不同源距的声源
体系更能探测到不同径向深度的地层信息,而且由
RC1
RC8 于不同声源的源距范围设计为互补形式,得到的不
RC2
RC7 RC3
ଌஆѵ 同径向深度信息也变得连续。相反,传统多极子阵
RC6 RC4
R1-R13 RC5
列声波仪器的源距范围和 T3 声源的相近,因而能
dx=0.5 ft 够探测到的径向地层信息也有限。
ʾӭౝT2
(mSs -1 )
6 3700
ᤊӭౝT3 LT3 min =LT2 max +dx
3600
ϦౝX,Y, T4T5
5
ᡔᤊӭౝT6 LT6 min=LT3 max+dx 3500
4 3400
图 2 三维声波仪器结构示意图 ູ䐍/m 3 3300
Fig. 2 Schematic diagram of 3D acoustic logging 3200
instrument structure
2 3100
1.1 三维声波测井的径向探测特性
3000
通过增加单极子声源,并不能直接增加探测 1
信息,还需要进一步对不同声源的源距进行优化 2900
设计,如图 2 所示,上下单极 T1 和 T2 采用对称分
0
2800
布方式放置于接收阵列两侧,这有助于井眼补偿 0 0.2 0.4 0.6 0.8 1.0
ᖴੁ䐍/m
测量以及固井质量检测。此外,仪器接收阵列一侧
图 3 径向分层模型下单极子不同源距探测深度射
的单极子声源 T2、T3 及 T6 的源距设计成互补形
线路径
式,即T2源对应的最大源距(LT2 max )和T3源的最
Fig. 3 The investigation depths of ray path for
小源距 (LT3 min ) 相差一个接收器间隔,T3 源对应
different monopole source to receiver spacings in
的最大源距(LT3 max )和T6源的最小源距(LT6 min ) radially stratified model
也相差一个接收器间隔,由于实际仪器测量间隔也
等于接收器间隔,测量完成后将对应于同一深度位 1.2 三维声波测井的周向探测特性
置的 3 个不同源距范围的声源道集合成在一起,则 为了研究三维声波测井在非均匀地层的周向
可以形成覆盖更大范围的连续的多源距等间隔测 探测特性,采用三维有限差分方法进行数值模拟来
量数据道集,这样可以提取到更加丰富、连续的地 获取单极声波测井响应,采用的仪器结构如图 1 所
层信息。 示,仪器轴向共有 13 个接收站,每个接收站 8 个方
假设井壁地层被污染后声波慢度变大,图 3 为 位接收器,单极子声源主频为 8 kHz,井孔直径为
三维声波测井这种源距设计的径向探测特性示意 0.22 m,仪器直径为 0.1 m,源距 3 m。模型参数如
图,图中的颜色标尺为径向变化的地层纵波速度,左 表 1 所示,模型的 x-y 和 x-z 剖面如图 4 所示,地层
侧为井孔,曲线为径向速度变化地层时不同源距对 2 为一与井眼呈 60° 夹角的块状地层嵌入到均匀地