
Page 64 - 《应用声学》2023年第2期
P. 64
252 2023 年 3 月
计精度不高。为了解决此问题,本文采用粒子群算 由于目标处于远场,采用固定系数项的方法进
法对近似线性化的多普勒公式进行处理,在牺牲计 行方差估计:
算效率下获得较高的跟踪精度。 a 2 k,1 b 2 k,2
2
σ v k,x ≈ 2 σ 2 f k,1 , σ 2 v k,y ≈ 2 σ 2 f k,2 . (14)
ˆ
V k = (Z k − Z k−1 )/T. (10) f 0 f 0
多普勒公式近似线性化如下: 2 算法描述
水下目标运动速度,相对于声速较小,即
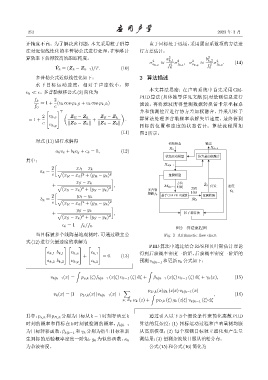
本文算法思路:在声呐系统中首先采用 GM-
v k ≪ c。多普勒频移公式(3)简化为
PHD 算法 (具体推导详见文献 [5] 对量测信息进行
2
f k
≈ 1 + (v k cos φ k,S + v k cos φ k,R ) 滤波,再将滤波所得量测数据转换笛卡尔坐标系
f 0 c
T 并和预测位置进行协方差加权融合,并采用粒子
( )
2 v k,x Z R − Z k Z S − Z k 群算法处理多普勒频率求解矢量速度,最终得到
= 1 + + .
c ∥Z R − Z k ∥ ∥Z S − Z k ∥
v k,y 目标的位置和速度的状态估计。算法流程图如
(11) 图2所示。
对式(11)进行求解得
Ѻݽ࿄গ ᣥѣ
X k֓
X
a k v x + b k v y + c k = 0, (12)
࿄গᤂүവی өவࣀҫిᚸՌ
其中:
[ X kk֓
2 x R − x k
a k = √
c (x R − x k ) + (y R − y k ) 2 ᧚വی
2
]
x S − x k வͯ ⌣
, Z k
+ √ M kk֓ ण ͯᎶ ᤴए
2
(x S − x k ) + (y S − y k ) 2 ܳҿ வͯ ⌣
[ ᮠረf k ण V k
2 y R − y k ۳̆GMPHDฉ ᧚ᣁ૱
b k = √ ⌣
M k
c (x R − x k ) + (y R − y k ) 2
2
]
y S − y k
, ዢߕᏆካข
+ √
2
(x S − x k ) + (y S − y k ) 2
c k = 1 − f k /f 0 .
图 2 算法流程图
当目标被多个线阵基地观测时,可通过联立公 Fig. 2 Arithmetic flow chart
式(12)进行矢量速度的求解为
PHD 算法中通过结合 RFS 和贝叶斯估计理论
a k,1 b k,1 v k,x c k,1 得到后验概率密度一阶矩,后验概率密度一阶矩的
+ = 0. (13)
预测v k|k−1 和更新v k 公式如下:
a k,2 b k,2 v k,y c k,2
∫ ∫
v k|k−1 (x) = p s,k (ζ)f k|k−1 (x|ζ) v k−1 (ζ) dζ + β k|k−1 (x|ζ) v k−1 (ζ) dζ + γ k (x), (15)
∑ p D,k (x)g k (z|x) v k|k−1 (x)
v k (x) = [1 − p D,k (x)] v k|k−1 (x) + ∫ , (16)
z∈Z k κ k (z) + p D,k (ξ) g k (z|ξ) v k|k−1 (ξ) dξ
其中,p s,k 和 p D,k 分别为目标从 k − 1 时刻存活至 k 通过引入以下 3 个假设条件来简化离散 PHD
算法的复杂度:(1) 目标运动过程和声呐量测均服
时刻的概率和目标在 k 时刻被检测的概率,f k|k−1
为目标转移函数,β k|k−1 和γ k 分别为衍生目标和新 从高斯模型;(2) 每个观测目标独立演化和产生量
测结果;(3) 量测杂波数目服从泊松分布。
生目标的后验概率密度一阶矩,g k 为似然函数,κ k
为杂波密度。 公式(15)和公式(16)简化为