
Page 159 - 《应用声学》2023年第3期
P. 159
第 42 卷 第 3 期 徐猛等: 基于整车控制参数同步采集的车辆异响分析 597
0 引言 1 车辆控制参数与NVH同步采集方法
随着我国汽车工业水平的不断发展,客户对汽 车辆控制参数与 NVH 同步采集是一种将整车
车的要求越来越多元化,对动力性、经济性、操纵 内部的控制参数,通过数据与协议的双重转换,转换
性、舒适性等方面要求也越来越高,相应的车辆控 为可以被 NVH 前端采集的格式,并与 NVH 数据同
制系统也越来越精细复杂。随着整车控制参数不断 步采集分析的方法。传统的 NVH 分析方法只能读
增加,车辆控制参数对于车辆异响的影响逐渐增多, 取车辆控制参数中的部分 CAN 协议数据,随着车
也带来更大的挑战。尤其车辆某些异响问题,其特 辆控制参数越来越复杂,仅使用部分 CAN 协议数
征频率往往不存在阶次或者共振带等频率特征,难 据难以实现对于车辆NVH问题的有效识别。
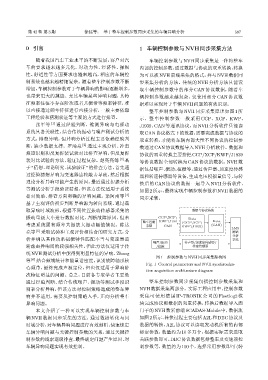
以直接通过频率特征进行直接分析,一般主要依靠 整车控制参数与 NVH 同步采集原理如图 1 所
工程经验和猜测验证等主观的方式进行排查。 示。整车控制参数一般采用 CCP、XCP、KWP、
张军等 [1] 通过经验判断,推测异响与电驱动 J1939、CAN 等通讯协议,而 NVH 分析软件只能读
系统具备关联性,结合传统振动与噪声测试分析的 取CAN协议格式下的数据,需要完成数据与协议的
方式,排查异响,但异响分析过程主要依赖经验判 双重转换,才能将车辆内部大量不同协议的控制参
断,缺少数据支撑。罗涌泉 [2] 通过主观分析、冲击 数通过 CAN协议数据导入 NVH分析软件。数据和
痕迹识别和反复拆装试验对比排查异响,但反复拆 协议的双重转换主要指把CCP/XCP/KWP/J1939
装对比试验的方法,验证过程复杂。赵亮亮等 [3] 基 等协议数据全部转换为 CAN 协议的数据。NVH 数
于“猜想 -理论研究 -试验验证” 的排查方法,首先通 据包括噪声、振动、扭振等,通过传声器、加速度传感
过经验猜想异响为变速器齿轮敲击导致,然后根据 器和转速传感器等设备,生成电压模拟量信号,与转
理论分析异响可能产生的原因,最后通过扭振分析 换后的 CAN 协议的数据一起导入 NVH 分析软件,
等测试分析手段验证猜想,但该方法仅适用于系统 如图2 所示,最终实现车辆控制参数和NVH数据的
相对简单、排查方向明确的异响问题。梁阿南等 [4] 同步采集。
基于主观评价初步判断异响源为转向系统,通过截
取异响时域波形,根据不同位置振动传感器采集的 ˁөᝬᣁ૱
振动量级大小进行数据对比,判断故障原因,但未 CCP\XCP\ Data
டᢼ҄ KWP\J193 (CCP\XCP\ Data
考虑系统固有频率共振放大振动幅值情况。陈达 Ԡ CAN KWP\J1939) (CAN)
亮等 [5] 采取试验和主观评价相结合的研究方式,分 LMS
ត
Ѭౢ
析并确认其传动系扭振特性匹配不当与变速器齿 ጇፒ
٪ܦ/ү ͜ܦ٨/ҫᤴए͜ਖ٨/
轮敲击异响间的较强相关性,但此方法仅适用于传 /ੵ ᣁᤴ͜ਖ٨
统NVH测试分析中能得到明显特征的异响。Zhang
图 1 控制参数与 NVH 同步采集架构图
等 [6] 结合频域统计和能量谱密度,识别故障轴承核
Fig. 1 Control parameters and NVH synchroniza-
心频带,最终完成声源定位,但也仅适用于异响阶
tion acquisition architecture diagram
次特征明显的问题。总之,目前各专家学者主要是
通过经验判断、结合传统噪声、振动等测试手段识 整车控制参数同步采集包括控制参数采集和
别和分析异响,但该方法对控制策略造成的整车异 NVH 数据采集两部分。实际工程应用中,控制参数
响并不适用,需要从控制策略入手,正向分析整车 采集可使用德国 IP-TRONIK 公司的 Fleetlog2 模
异响问题。 块完成协议和数据的双重转换,转换后数据导入西
本文介绍了一种可以实现车辆控制参数与车 门子的 NVH 数采前端 SCADAS-Mobile 中,数据流
辆 NVH 数据同步采集的方法,通过数据转化与同 如图2所示,转换过程主要包括A2L和DBC协议及
时域分析,对车辆异响问题进行有效剖析,快速锁定 数据的转换,A2L 协议可以读取发动机所有的内部
车辆异响问题与关键控制参数的关系,通过关键控 标定参数,数量约为 10 多万个,根据实际需求选取
制参数的线索逐级排查,最终确定问题产生原因,对 关联参数即可,DBC协议数据包括整车及变速器控
车辆异响问题实现有效控制。 制参数等,数量约为 100 个,选择常用参数即可 (转