
Page 176 - 《应用声学》2023年第4期
P. 176
838 2023 年 7 月
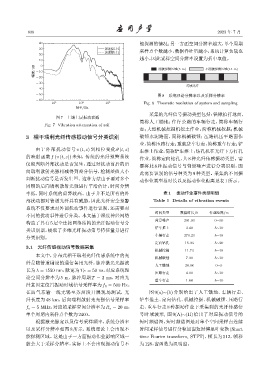
40 能探测的情况;另一方面空间分辨率越大,单个周期
30 ҫᤴएᝠ2
ҫᤴएᝠ1 采样点个数越小,数据吞吐量越小,系统计算负载也
20
越小,因此采样空间分辨率设置为折中取值。
10
ࣨए/dB -10 0 ᑟᜂଊӝ۫(5 m) ˀᑟᜂଊӝ۫(15 m)
-20
-30
͜ਖАጜ
-40
-50
图 8 系统理论分辨率以及采样分辨率
-60
10 1 10 2 10 3 Fig. 8 Theoretic resolution of system and sampling
ᮠဋ/Hz
采集的光纤信号振动类型包括:铁锹拍打地面,
图 7 土壤土层振动衰减
简称人工锄地;伴行公路的车辆行走,简称车辆行
Fig. 7 Vibration attenuation of soil
走;大型机械挖掘机挖土作业,简称机械挖掘;机械
3 相干瑞利光纤传感振动信号分类识别 破锤水泥路面,简称机械破锤;压路机压平路面作
业,简称压路行走;重载货车行走,简称重车行走;铲
由于外部扰动信号 v (t, z) 到相位变化 θ (t, z)
车推土作业,简称铲车推土;钻孔机在光纤下方打孔
的映射函数 f (v (t, z)) 未知,传统的光纤预警系统 作业,简称定向钻孔,共8 种光纤传感振动类型。需
仅能判断外部扰动是否发生,通过对扰动前后的后 要将此 8 种振动信号与背景噪声进行分类识别,因
向瑞利散射光强相减得到差分信号,检测差值大小
此需要识别的信号种类为 9 种类型。采集的不同振
判断扰动信号是否发生 [6] 。这种方法由于要对多个 动作业类型总时长以及振动作业距离见表1所示。
周期的后向瑞利散射光强进行平滑估计,时间分辨
率低,同时系统的虚警较高。由于并不是所有的外 表 1 振动作业事件类型明细
部扰动都对管道光纤具有威胁,因此光纤安全预警 Table 1 Details of vibration events
系统不仅要求对外部扰动事件进行识别,还需要对
时间类型 数据时长/h 作业距离/m
不同的扰动事件进行分类。本文基于深度神经网络
背景噪声 201.93 0∼30
构造了具有 5 层全连接网络结构的光纤振动信号分
铲车推土 3.49 5∼10
类识别器,提取了多维光纤振动信号特征量并进行
车辆行走 270.23 5∼15
分类识别。
定向钻孔 15.33 5∼20
3.1 光纤传感振动信号数据采集
机械挖掘 11.73 5∼15
本文中,分布式相干瑞利光纤传感系统中的光
机械破锤 7.30 5∼10
纤是随管道铺设的通信备用光纤,脉冲激光光源波
人工锄地 28.98 0∼3
长为 λ = 1550 nm,脉宽为 T P = 50 ns,对应系统理
压路行走 4.00 5∼10
论空间分辨率为 5 m,脉冲周期 T = 2 ms,对应光
重车行走 1.64 5∼10
纤某固定位置振动时域信号采样率为f 0 = 500 Hz。
在西气东输一线无锡至苏州段开展现场测试,光 图 9(a)∼(h) 分别给出了人工锄地、车辆行走、
纤长度为 48 km,后向瑞利散射光光强信号采样率 铲车推土、定向钻孔、机械挖掘、机械破锤、压路行
f s = 5 MHz,对应的采样空间分辨率为 R s = 20 m, 走、重车行走 8 种振动作业下采集到的光纤传感信
单个周期内采样点个数为2400。 号时域波形, 图 9(A)∼(H) 给出了对应振动信号的
根据激光脉宽以及信号采样频率,系统分辨率 短时频谱图,短时频谱图是对单个空间采样点连续
以及采样分辨率如图 8 所示,系统理论上会出现不 时间采样信号进行分帧加窗短时傅里叶变换(Short
能探测区域。这是由于一方面振动作业影响区域一 time Fourier transform, STFT),帧长为 512,帧移
般会大于采样分辨率,实际上不会出现振动信号不 为128,窗函数为汉明窗。