
Page 180 - 《应用声学》2023年第4期
P. 180
842 2023 年 7 月
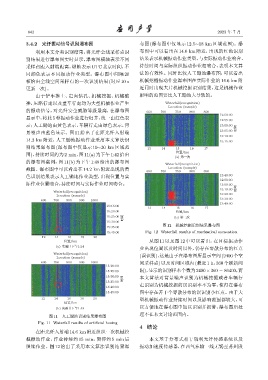
3.4.2 光纤振动信号识别瀑布图 布图 (瀑布图中仅显示 12.5∼18 km 区域范围)。瀑
利用本文分类识别结果,将光纤全线采样点识 布图中可以看出在 14.6 km 附近,出现的红色识别
别结果进行瀑布图实时显示,瀑布图横轴表示不同 结果表示机械振动作业类型,与实际振动作业吻合。
采样点距入射端距离,纵轴表示 UTC 北京时间,不 持续时间与实际组织振动作业相吻合,表明本文算
同颜色表示不同振动作业类型。瀑布图中间隔 20 法的有效性。同时比较人工锄地瀑布图,可以看出
帧给出全线空间采样点的一次识别结果 (对应 10 s 机械挖掘振动作业瀑布图在实际作业的14.6 km 附
更新一次)。 近同时出现大片机械挖掘识别结果,这是机械作业
由于铲车推土、定向钻孔、机械挖掘、机械破 影响的范围要比人工锄地大导致的。
捶,压路行走以及重车行走均为大型机械作业产生 Waterfall(recognition)
Location (sample)
的振动信号,对光纤安全威胁等级最高,在瀑布图 650 700 750 800 850
12:50:00
显示中,将此 5 种振动作业进行归并,统一由红色表
12:55:00
示;人工锄地由黄色表示,车辆行走由绿色表示,背 13:00:00 ᫎ
景噪声由蓝色显示。图 11 给出了在距光纤入射端 13:05:00
13:10:00
14.2 km 附近,人工锄地振动作业采用本文算法识 13:15:00
别结果瀑布图 (瀑布图中仅显示 10∼30 km 区域范 13 14 15 16 17
ͯᎶ/km
围),持续时间约为 2 min,图11(a) 为下午 1:42 给出
(a) ኄʷ
的瀑布图截图,图 11(b) 为下午 1:48 给出的瀑布图
Waterfall(recognition)
截图。瀑布图中可以看出在 14.2 km 附近出现的黄 Location (sample)
650 700 750 800 850
色识别结果表示人工锄地作业类型,出现位置与实 12:40:00
12:50:00
际作业位置吻合,持续时间与实际作业时间吻合。 13:00:00
13:10:00 ᫎ
Waterfall(recognition)
Location (sample) 13:20:00
13:30:00
600 700 800 900 1000
13:40:00
15:15:00
13 14 15 16 17
15:20:00 ͯᎶ/km
15:25:00 ᫎ (b) ኄ̄
15:30:00
图 12 机械挖掘识别结果瀑布图
15:35:00
15:40:00 Fig. 12 Waterfall results of mechanical excavation
12 14 16 18 20
ͯᎶ/km 从图 11 以及图 12 中可以看出,在目标振动作
(a) ࠄᰎெʾӥ1:24
业出现位置以及时间以外,仍存在零散分布的红点
Waterfall(recognition) (误识别),这是由于在瀑布图所显示空间(2400个空
Location (sample)
600 700 800 900 1000 间采样点) 以及时间区域内 (最近 1 h,360个刷新间
15:20:00
15:25:00 隔),显示的识别样本个数为2400 × 360 = 86400,而
15:30:00 本文算法对背景噪声识别为机械挖掘或者车辆行
15:35:00 ᫎ
走识别为机械挖掘的误识别率不为零,使得在瀑布
15:40:00
15:45:00 图中存在若干个零散分布的误识别小红点。由于大
12 14 16 18 20 型机械振动作业持续时间以及影响范围都较大,可
ͯᎶ/km
以方便地在瀑布图中加以识别并报警,瀑布图后处
(b) ࠄᰎெʾӥ1:48
理不在本文讨论范围内。
图 11 人工锄地识别结果瀑布图
Fig. 11 Waterfall results of artificial hoeing
4 结论
在距光纤入射端 14.6 km 附近组织一次机械挖
掘振动作业,作业持续约 15 min,暂停约 5 min 后 本文基于分布式相干瑞利光纤传感系统以及
继续作业。图 12 给出了采用本文算法识别结果瀑 振动加速度传感器,在西气东输一线无锡至苏州段